



-

プログラムで制御を学べる!低価格ドローンキット(ST-DRONE)を試してみた
-
【2024】OpenCV×ラズパイで実現!顔認証&顔識別によって漫画キャラの反応を変える
-
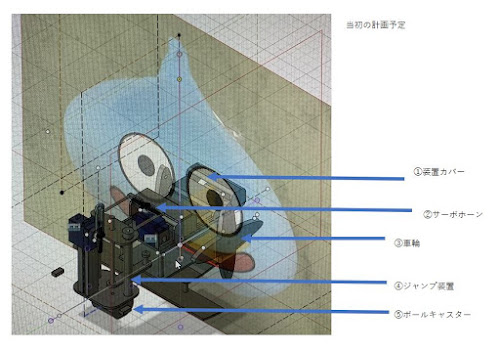
3Dプリンターを使って、petoi bittleにアニメキャラ「魔法少女まどかのキュウべえ」の外形を作って見た。
-
4足歩行ロボット Petoi BITTLE を購入!ラジコンのような操作感が楽しい
-
透過型ディスプレイを自作してプラモの背景を作る!
-
ガンプラ(ケンプファーアメイジング)のカタパルトを作成して発進シーンを再現する
-
あの恐怖の人面蜘蛛を再現!鬼滅の刃の世界をラジコンで具現化
-
爆走!スライムラジコン製作記3(自作ラジコン) 製作編
-
爆走!スライムラジコン製作記2(自作ラジコン) 3Dプリント編

お台場ロボット探訪:ユニコーンガンダムとRX-78ガンダム
プログラムで制御を学べる!低価格ドローンキット(ST-DRONE)を試してみた
爆走!スライムラジコン製作1(自作ラジコン) アイデア編
eagle回路図をタッチペン(サーフェスプロ)での作成と使用感
買い換えてから気づいたスマホ用三脚、購入ポイント(HUMSOOY)
タミヤ 多段ギヤボックスをDIYで検証!「ギヤを組み替えてギヤ比とパフォーマンスの違いを体感」
大型3Dプリンタを利用してのABS印刷に挑戦(Anycubic MEGA X)
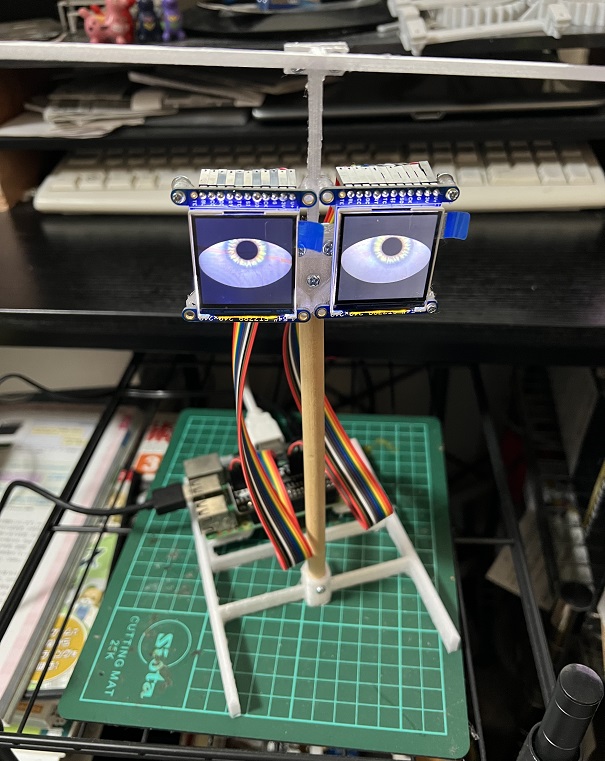
ロボット工作の目に使えるAdafruit Animated Eyes Bonnet for Raspberry Pi Pack 購入