eagle回路図をタッチペン(サーフェスプロ)での作成と使用感
サーフェスをお持ちの方は、使用感に関して既にご存知だと思うので、この記事は必要ありません。
サーフェスは気になるけど高いし、持ち歩きで回路作成とか使えるのかな?高い金出して使い物にならなかったら意味が無いと購入を足踏みしている人はご参考にしてください。
マイクロソフトのホームページとか見ると、すごくお洒落でかっこよく、スタバ等でスマートに使いこなす自分をイメージした夢だけが先行して広がってしまうでしょう。
ですが実際使ってみた時どう?っていう面があると思います。
(もちろんデスクトップでマルチモニタにして、回路図とボード図を同時表示が絶対良いですが)
自分が購入前に、サーフェス検討において気になっていたところは以下です。
- Eagleはアプリケーションとして対応しているのか?推奨スペックの記述もなかなかみつからないし、そもそもwindows10 64ビットは対応しているのか?
しかしこれは2018の時点ではほとんどのPCがwindows10で販売だから、OS選択の余地は無いのですが、タブレットパソコンは普通のPCと仕様違いでなんかエラー出たりしない? - タブレットなんだからペンで回路図引けたら良さそうだけど、アプリケーションとの相性として、ペンは動くのか?反応するとしても位置がずれていたり、使い物にならなかったりしないか?
結局、それ以外のメリットを考え購入しました。購入後早速利用してみます。
ぎんてん所有のサーフェスは2017年発売のSurface pro(5代目)数字のつかないタイプです。
(2018年の夏ごろ買いました)
Surface pro4(201510)とSurface pro6(201810)の間にあたります。
グレードは色々ありますが、ぎんてん使用のサーフェスのスペックは以下となっています。
OS Win10 pro
プロセッサ i5-7300U
メモリ 8GB
ストレージは 128GB
利用目的はeagleやPICにおけるMPLAB目的の為、高スペックがもちろん欲しいところではありましたが、予算もあってそれなりの使用感が見込めるであろう中スペックに決めました。
ストレージは、サーフェスに大データは保存するつもりはないので低めにしました。
ペンは4096段階の筆圧検知のついた原稿型の純正Surfaceペンです。(1024段階の旧式には注意してください。)
この執筆はこたつでぬくぬくと書いており、これだけでももう十分に買った価値があるのではありますが(笑)。
今回はあくまでもペンを用いての使用感の為、eagleの細かい説明は省きます。
又、回路制作のレベルが低い点はご容赦ください(汗)。
さて回路の方ですが、使用感といっても実際に自作ロボットで利用する回路を作成します。
この回路はラズベリーパイとの接続をしますが、他にトランジスタ技術201803月号AI電脳制作とタイアップされた共立電子さんの基板とも接続します。
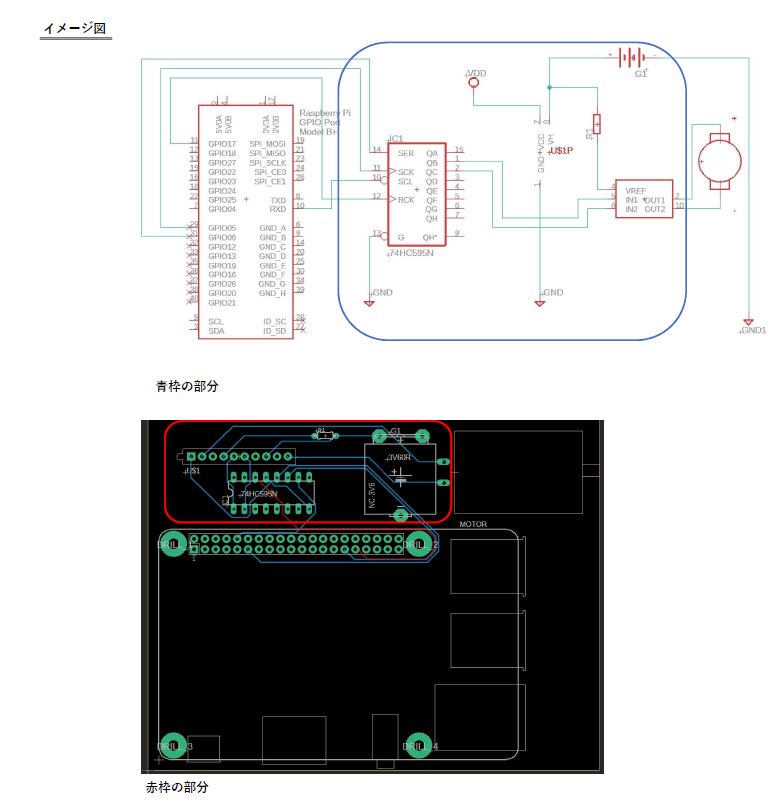
自作で利用可能なGPIOを確認すると9本となっています、下の画像肌色の部分ですが、モータやLEDの接続を考えると不足です。
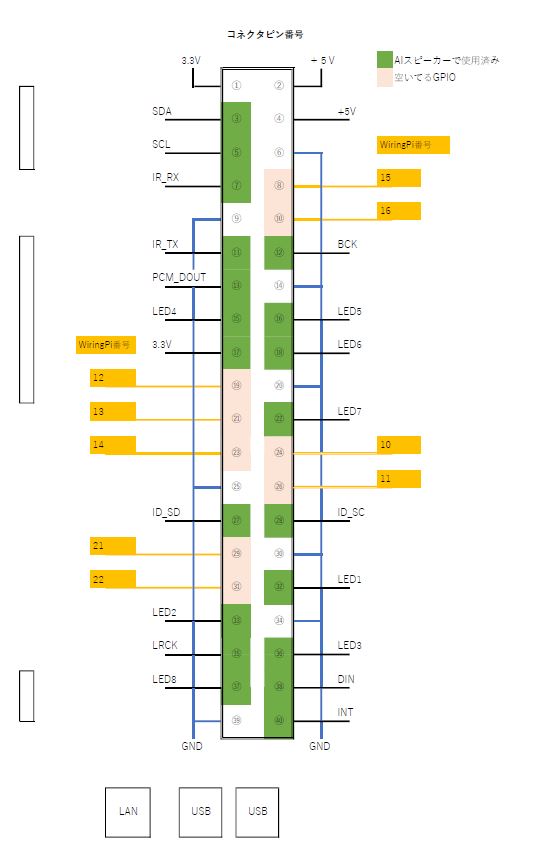
この不足を補うためにシリアル入力ーパラレル出力というのに挑戦します。
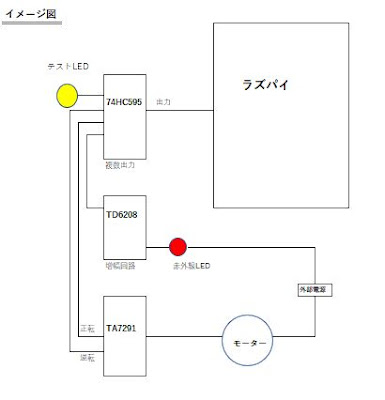
なので今回、ラズパイ→74HC595→TA7291P→モーターという想定で、74HC595とTA7291Pとの接続箇所をeagleで作成してみます。
ちなみにサーフェスの利用はブラウザ見るにしても、コタツ・運転席・トイレ(持ち込むなよ)や、寝転がって床に置いて場所を選ばずペンでスクロールしたりアプリ切り替えたり。手で画面の操作は疲れるけど、肘を伸ばさず手首だけで画面をほいほい直接操作していけるのがすっごい便利なんですよね。マウスと同じ感覚だが場所がいらない。
今回、純正ペンを活用して行きますが、この純正ペンちょっと小回りが利いてて。
ペンの後端を一回押すと画面右側に付箋やら、手書き用の白紙スペースやらのランチャーが立ち上がります。
二回押すと手書きを追加出来るスクリーンショットが立ち上がる。
もう一回押すと元にもどる。デスクトップだとこの使用感はない!。
手書き用の白紙スペースが、消去しない限り残ってて別作業しながらアイデアを追加していけるのが超便利です。
(ペンでボタン押さないと元に戻れないのは面倒です。タスクーバーで切り替えれたらいいのに。)
この白紙スペースを使って、まずはアイデアとしてブロック図のような物を書いてみます。
動画はサーフェスの前に撮影用のカメラを置き、手書き感におけるペン反応が見えるように手を伸ばしているので、かなり無理な体勢で書いてます・・・。
普通の体制であれば自然に書けます。また、このサーフェスとペンの組み合わせは、
ペンが画面近づいていれば手が画面にふれても反応しないので小指で画面を抑えながら書いています。
ペンのみ反応してくれるのが非常に便利です。
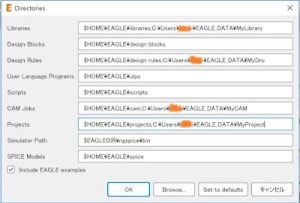
ところでサブPCであるサーフェスで、eagleを起動したところ、新規インポートしたライブラリが呼び出せませんでした。メインであるデスクトップPCをクラウドアカウントよりログアウトすると利用出来るようになりました。
(メーカー記述の無償版ではサブスクリプションの複数利用不可に該当するのかもしれません。)
さてeagle回路図の作成ですが、eagleのバージョンは9.2.2free(201901)。
もちろんキーボードとマウスがあれば、より回路作成しやすいところですが、
ここはペン使用感の為にこれらは使用せず、あえてタブレットモードのみで作成したいと思います。
ラズベリーパイから74HC595Nを通してTA7291そしてモーターへ。
全体としては下記のイメージになりますが、枠内の部分だけペンで作成します。
反応や操作感等は記述するより見た方が分かりやすいと思うので動画をご覧ください。
但し、先の動画と同様にカメラを挟んでの操作の為、多少ぎこちないかもしれません。
Eagle起動はダブルクリックしてから一瞬間があります。
あれっ?ちゃんと押せなかったのか?ともう一回ダブルクリックして気が付いたら二重起動になってたりするくらい。スペックは悪くないはずなんだけど。モバイル用i5だからなのかな?
起動してまず気になるのが、デスクトップに比べて色合いが違います。
薄緑がかかってるような、タッチパネルのせいでしょうか?
イラスト製作とかと違って、色合いは回路制作には差しさわりはないですけど違和感を感じます。
そして部品選択ですが、見ての通りペンの反応はEagle使用においてもすごくいいです。
ペンを画面に近づけていれば手は反応しない機能、これはEagleアプリケーション使用時も同じです。
ただし部品を配置する時、もたつきというか遅延がある時があります。これもCPUの処理のせいなのか?タッチパネルの特性なのか?遅延がある時はすぐわかるので、ちょっと待てばいいのでそれ程気にはなりません。
また、今回のインポートライブラリの利用はトランジスタ技術2013年05月号の付録、2000品種!トラ技部品ライブラリのCDを利用しています。
使用したEagleにおけるパーツライブラリは以下です。
- 5V電源 supply2→VDD
- GND supply2→GND
- 9V電池 battery→AB9V(バッテリーで他にいいのがなかった)
- 抵抗 rcl→R-EU→0207/10
- コンデンサ rcl→C-EU→C-EU025-024X044
- LED led→LED→LED5MM
- モータードライバ interface→TA7291→TA7291P(トラ技の付録よりインポート)
- シリアルパラレル変換 74xx-eu→74*595→74HC595N
次の動画ではラインを引いていますが、今のところエラーも出ていないしラインを引く反応もなかなかいいです。
動画の方がちょっと長めになりすぎてしまったので、ライン引きの感じだけ確認したいかたは3:55分あたりから8:45分あたりまでを参照していただければ良いと思います。
自分がきちんと機能を使いこなせていない点もありますが、
画面が小さいので部品選択のポイントをミスってEagleから怒られるエラーは出てます(笑)。
そんな時は必殺、ピンチアウトで画面拡大!です(笑)。
さてここで回路に関してですが、ERC(回路図)チエックをかけるとエラーになりました。
(繋がってないところがいっぱいあるから当たり前ですが)
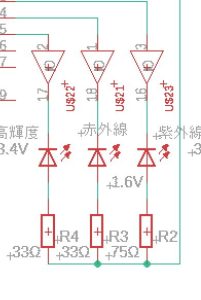
抵抗値を記入して、ちゃんと計算して値を入れようとLEDを買う時にもらったデータの紙を確認したら
- 5Φ赤外線LED OSI5LA5111A 1.6V 100mA 940nm 15° 60mW/sR
- 3Φ紫外線(UV)LED CB-204QPC 365-370nm vf:3.4V If:20mA 波長:365-370nm
- 高輝度LEDの紙は見当たらないけど30mAとする。
- GPIOピン1本あたりの最大電流は16mA
- 複数本のGPIOピンを使用する場合、同時に流せる電流の合計は50mAまで
ツール・ラボ様 第22回 Raspberry PiのGPIO概要 より引用
ラズパイから直接電流を流す訳ではないので壊れるのは大丈夫かもしれませんが、全てのピンを利用すれば電流が不足するのは明らかなので、その後トランジスタアレイTD6208APGというのを追加して回路図を修正しました!
74HC595Nも全体で70mAと調べました。74HC595Nを利用しても全てを直接駆動は難しく、この方法しかないようです。
以下がボード図の作成動画です。
結論として、ボード図作成に対してもeagleの利用においてエラーの発生はありません。
又ペンの利用においても反応は良いです。
ただBluetooth上の問題か、やはりまれに一瞬、遅延を感じる事がある時と、
画面が小さいので部品選択のポイントが良く分からず、上手く動かせない事はありますが、慣れれば問題無い範囲と思います。
後は文字入力や文字の切り替えがソフトウェアキーボードではめんどくさいのと、
このブラウザ等の入力に関してですが、ペンでコピぺは上手くできないので、
ショートカット等使うのにハードウェアキーボードがあった方が楽だったりします。
電車の中や車の中で、思い付いて回路の確認や修正等、ペンを利用したモバイルで使えるのはホントに便利です。マウスだと場所を選ぶし、帰宅するまでに忘れてしまう。
サーフェスの選択は予算が高めについてしまいますが、それだけの価値はあると思います。
補足 回路部品に関して
以下は補足として利用した使用部品や回路に関する説明です。
74HC595
トラ技2016年3月号の付録で”全ラズパイ対応!楽々I/O関数セット WiringPiトラの巻”というのがあり、
そこに74HC595でポートの不足を補うことが出来るとありました。
冊子での実利用はPSoC5LPというのを使っていて違いはありましたが、74HC595というのを調べて使用してみました。
ラズパイにしても、他のデジタルICにしても、一本のピンに一つの信号入出力が基本ですが、ピンが足らない場合、
シリアルパラレル変換というのを使うと。一本のピンの入力で複数の出力に分岐してくれます。
今回は74HC595の利用で1本のピンへの入力信号をを8本の出力信号に増設しています。
さらに74HC595は連結出来るので、使用可能ピンをもっと増やせるという便利さ。
使い方のイメージとしては
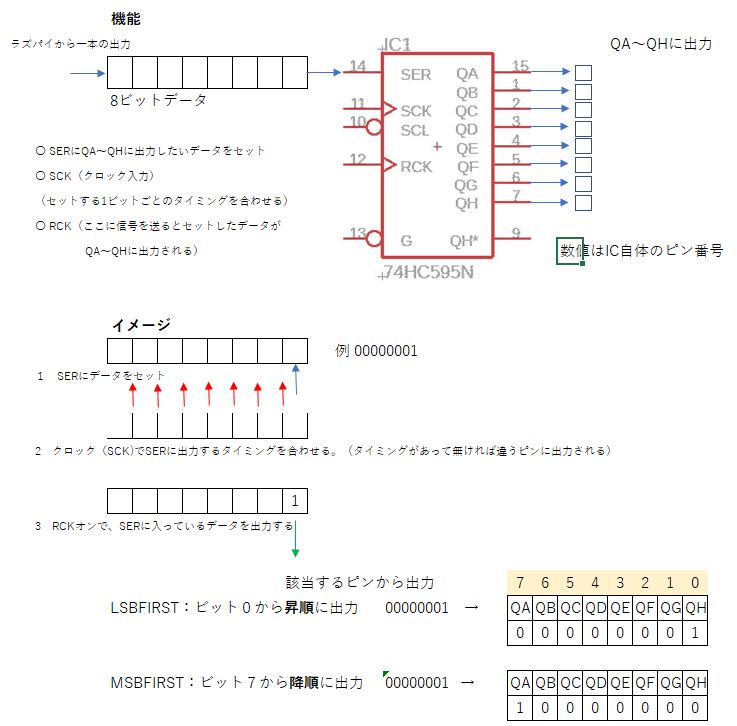
入力側に、SER(データ入力)、SCK(クロック/タイミング)、RCK(データ送出)を繋いで。
出力側は、QA~QHを繋ぎます。
それをラズベリーパイにプログラムで記述するのですが、
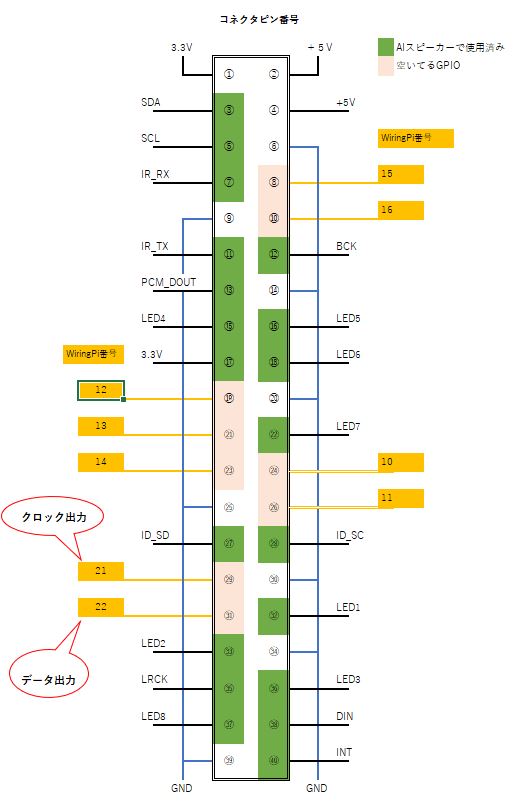
WiringPiの場合はshiftOut(22,21,LSBFIRST,0X01);のような構文です。
shiftOut→シリアル出力設定
22 → データ出力ピン
21 → クロック出力ピン
LSBFIRST → QHから左詰め
0x01 → 出力データ(74HCのQHピンに繋いでる赤外線LEDに対して信号を送る)
といった内容になるので
ラズパイのWiringpi 22番からデータ(00000001)を左詰めで74HCに送るということです。
21番はタイミング合わせのクロック出力
ラズパイに対して以下のように利用しました。
以下は間違えやすいので、実際のICピンとシンボル図ピンとの対比です。
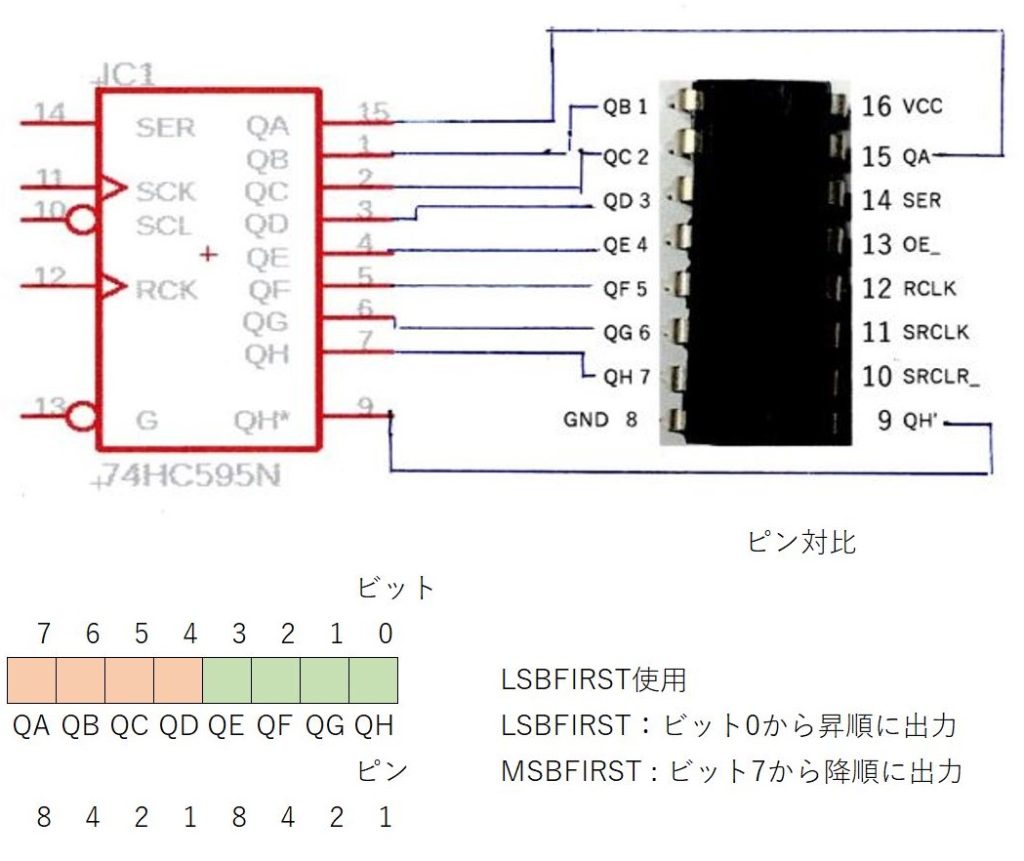
今回はLSBFIRSTしか使ってませんけど、
LSBFIRSTで0x01なら00000001(ビット0から1を出力し最後にビット7で0を出力)
MSBFIRSTで0x01なら10000000(ビット7から1を出力し最後にビット0で0を出力)
LSBFIRSTで0x10なら10000000(ビット0から0を出力し最後にビット7で1を出力)
MSBFIRSTで0X10なら00000001(ビット7から0を出力し最後にビット0で1を出力)
非常にややこしいです。
それからクロック出力ですが、ラズパイのクロック出力専用ピンを使わずとも一般のGPIOで稼働しています。
(ラズパイのクロックピンはAIスピーカーキットでは使用ピンの為、使えない)
※参照させて頂きましたトランジスタ技術2016年3月号の付録
全ラズパイ対応!楽々I/O関数セットWiringPi虎の巻ですが、付録の総集で販売があるようです。
どんなものだったか知りたい方は書店でこちらを確認してみて下さい。
最後の方に同内容が載ってました。
TD62083APG
ラズパイ→74HC595→LEDとする予定でしたが、赤外線LEDは100mAの為、TD62083APGを利用しました。
- ラズパイだとピン一本の出力が16mA、全体で50mA。
- 74HC595Nだと全体で70mA。
TD62083の接続ですが、動作テストはこの接続で動作しています。
(LEDと抵抗の並びが回路図では入れ替わってます)
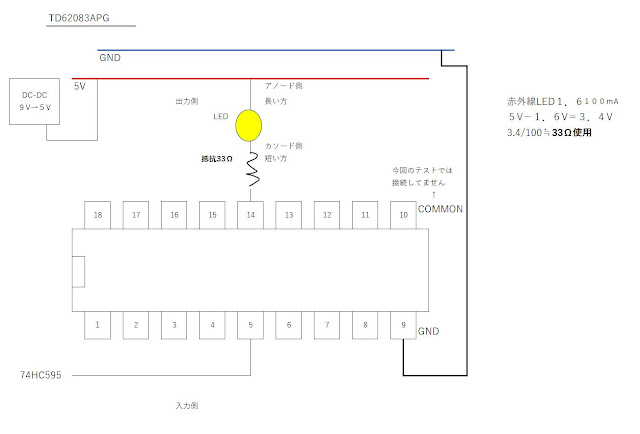
回路図だと良く分かりませんが(何でこんな形なんだろう?)
通常のICだとLEDのアノードへそしてカソードからGNDへと行きそうですが、
5VからLEDのアノード、そしてカソードからTD62083のGNDへ流れてるようですね。
赤外線LEDの抵抗値は5-1.6=3.4 3.4/100≒33Ωとしました。
動画のテストでは入力側は3本同時につかってません、1本だけ赤外線だけ使用してます。
テストなので1本ずつ繋ぎ変えてました。
COMMON端子は使ってません、LEDくらいでは接続の必要なしとみましたので、接続無しで様子見してます。
DC-DCを途中に挟んだのは、先に述べた赤外線LED、高輝度LEDなど電流を食いそうなので、ラズパイからの供給は避けた方がいいかなと、モータードライバTA7291P用の9Vから分岐してます。
入力に関してはhfe(増幅率)1000が気になりますが、内部抵抗2.7kのまま直つなぎでこちらも様子見しています。
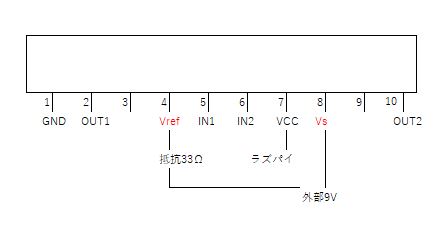
TA7291P
TA7291Pデータシートの通りに繋いでいます。
Vsは模型用のモーターとしては3Vあれば良いのでしょうが、
DC-DC5V使用の為、それより高い9Vを使用しています。
Vref<=Vsで無いといけないのは分かってるんですが、Vrefを76Ω+33Ωで繋いでみましたが何がおかしいのか、
分圧して約3Vとしても、約6Vとして取り出しても動かないので、そのまま33Ωの9Vになってますね・・課題です。
9V 33Ω 272mA 2.45W
今回の動画で首の左右首振りで使用しているタミヤ遊星ギヤーボックス(付属モーターRC-260)ですがこいつは他のタミヤクラフトシリーズと違いギヤ比の記述しかありません。
回転トルクや回転数の記述がないので、出力の推論がしにくいです。
こういうこともあって、後にタミヤ 多段ギヤボックスをDIYで検証!「ギヤを組み替えてギヤ比とパフォーマンスの違いを体感」という記事を作成しました。
ギヤボックスに電池を直つなぎでは即動作するので、ドライバー側の問題だと問題だとおもいます。
WiringPiでTA7291Pに信号入力をあたえてもすぐに動作しません。
WiringPiに関しても又記述したいと思いますが、
テストプログラムで信号入力して500ms待ちしても動く気配はなく、1500ms待ちで動画の動作です。
ギアボックスにすぐに電力が行き渡らないのかも。
分圧では1000ミリ待ちまでしかテストしてないので、又確認します。
補足
この記事記述後、他の駆動模索の為いろいろ確認していたら、
後閑哲也先生の”電子工作は失敗から学べ!”という書籍の中で、遊星ギヤーボックスの回転数とトルクの記述をみつけました。
| ギヤ比 | トルク | 回転数 |
|---|---|---|
| 4:1 | 50 | 2450 |
| 5:1 | 58 | 1960 |
| 16:1 | 136 | 612 |
| 20:1 | 156 | 490 |
| 25:1 | 185 | 392 |
| 80:1 | 516 | 124 |
| 100:1 | 580 | 98 |
| 400:1 | 1794 | 24 |
ちなみに上記の電子工作は失敗から学べですが、初心者にはちょっと難しいかなという面もありますが、制作例をもって考え方を指導されているようで勉強になります。
又、基板の実制作やモーターの計算も書いているので、非常にためになりました。