
この挑戦記は私がロボットを作ってみたい!と、素人ながら一番最初に取り組んだ製作記です。
一応電気や簡単なプログラム等は少しづつ勉強し、冊子を読んでちょっとしたハンダ工作はしていましたが、
大きな製作はそれまでしたことはありませんでした。
この時は3Dプリンタも無いし、身近にある似通ったものを流用しています。
諦めなければそれなりの製作は出来るという良い経験に繋がったと思います。
「アトム・ザ・ビギニング なんちゃってA106製作記」として、
bloggerで数か月にわたり活動内容として記述していましたが、wordpressに引っ越しに合わせて編集してまとめました。

完成動画
以下は作成記です
1 アトム・ザ・ビギニング なんちゃってA106製作計画
アトム・ザ・ビギニングとは
製作を決意した時、ちょうどアトム・ザ・ビギニングというアニメが放送されていました。
ロボットアニメの前身である鉄腕アトム。
その鉄腕アトムに出てくる二人の博士の若かりし頃の話であり、アトムのプロトタイプ製作という興味深いものでしたが、共感するものもあってA106に取り組んでみたいと思いました。
- 原案: 手塚治虫
- マンガ版: カサハラテツロー(コンセプトワークス、ゆうきまさみ)、手塚プロダクション
- アニメ版: 2017年に放送され、制作はOLM、Production I.G、Signal.MDが担当。
特徴
- 『鉄腕アトム』のファンはもちろん、原作を知らない人でも楽しめる深いテーマ性があります。
- 若き日の天馬博士とお茶の水博士の人間性や、それぞれの思想が掘り下げられており、彼らの関係が後の物語にどう繋がるかを想像するのが興味深いです。
- 科学や技術だけでなく、人間ドラマや倫理観がテーマとなっており、大人も楽しめる作品です。
漫画は月間ヒーローズ休刊の為、コミプレで配信されています
アニメは amazon prime、U-NEXT等で配信されています。
製作計画
冒頭に記述したように、ロボット工作に取り組むと決意したものの、予算や技術、そして自分のスキルには限りがありました。そのため、雰囲気を重視しつつ、パーツ集めには廃材を活用する方針を取ることにしました。
アニメの中でA106のAIにはベヴストザインという自立型AIを目的としています。
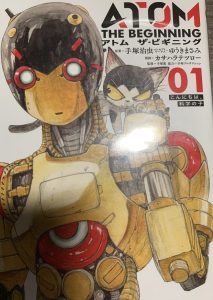
ちょうどその頃「トランジスタ技術 201803月号 AI電脳製作」の特集で、
タイアップされたシリコンハウス様のAIスピーカーキットとラズパイ3を組み合わせて使う記事を目にし、
ベヴストザインとはいきませんが、これをコアとして流用できないかと考えました。
このAIスピーカーキットというのは、音声入力やリモコンを利用してGoogle Assistant、もしくはAmazon Alexaのサービスと接続し、会話やリモコン操作させるというものでした。
完成すれば音声で移動・動作、会話、情報提示と夢のようなキットでしたが、残念ながら全てを統一して完成させるには幅広く深い技術が必要であった為、一部の機能を利用に留まりましたが、これらを元に製作を行っています。
2 身近なものを利用して外形製作・ヘルメット流用
パテ埋めと塗装
本来、製作ををする時は、内部構造から作ってそれに合わせて外形を作ると思います。
現在であれば3Dプリンタ(Anyucubic MegaX)を所有していますので利用しますが、この時はこれといった設備は持っていませんでした。
アニメを見ていて気づいたのですが、A106の頭部が実家にある使っていないヘルメットにどことなく似ているように感じ、A106の頭部と1/1サイズにマッチしそうなので、これを活用するアイデアも浮かびました。

1/1頭部を目標として、ヘルメット流用とはいえ、A106の頭部となるよう各方向から眺めてイメージを確定させました。
顔のイメージに合いそうな角度を探す為に、紙でベースぽいものを張って顔のイメージ作って、またいろんな方向から眺めて・・の繰り返し。

ヘルメットには大きな穴が開いているので、パテで埋めますが抜け落ちないように硬化がよいロックタイトのエポキシパテを使用です。
(参考)amazon LOCTITE(ロックタイト) 多用途補修パテ 2本パック

穴にパテを埋めやすいように一旦、裏からガムテープを貼ってパテを埋めて、サンドペーパーで磨きました。
このパテでの穴埋めは4年経った現在でもしっかりと陥没することもなく硬化してくれています。

使用する角度は決まったので、塗り分けの微調整と穴あけ等を行うための、イメージ画をエクセルで作成しました。

図に合わせてマスキングしました。
マスキングテープは通常のマスキングテープ以外に、面の線引きとしてタミヤの曲面用マスキングテープを利用しています。カーブにはすごく便利です。

目に合いそうな素材(商品)を探して、なんと”快栓キャップ”
ホームセンターや100均も普段は目に入りませんが、一つ一つ商品を見ていくとこんなものがあったのかと発見があったりします。(本来の利用目的とは大きく外れますが)

上図の位置に快栓キャップがハマる大きさに穴を開けて、色分けしました。

ゴム塗装

外形としてはほぼ完成です。
自己評価となりますがA106の雰囲気は出てると思います。
3 頭部の機構はタミヤギヤボックス利用
首機構検討
頭部制作と合わせて頭部駆動を考えていました。
全身製作は無理な為、台となるボディを作ると決めていましたが、
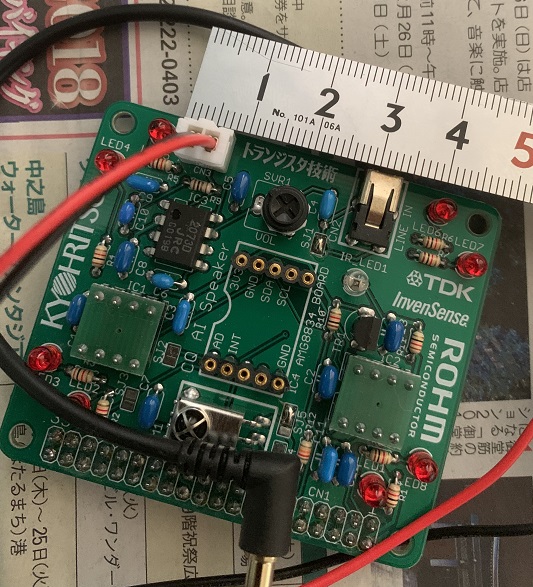
頭部の稼働を上下と左右の二軸で行くか?、傾きも含めた三軸で行くか?
悩みましたが複雑になりすぎても挫折しそうなので二軸で制作することにしました。
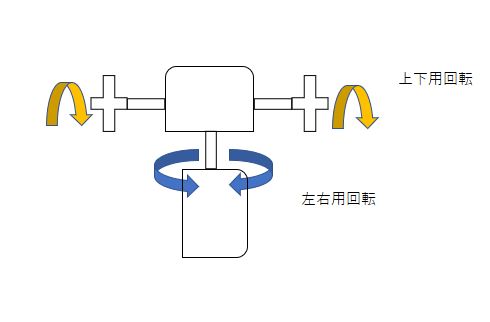
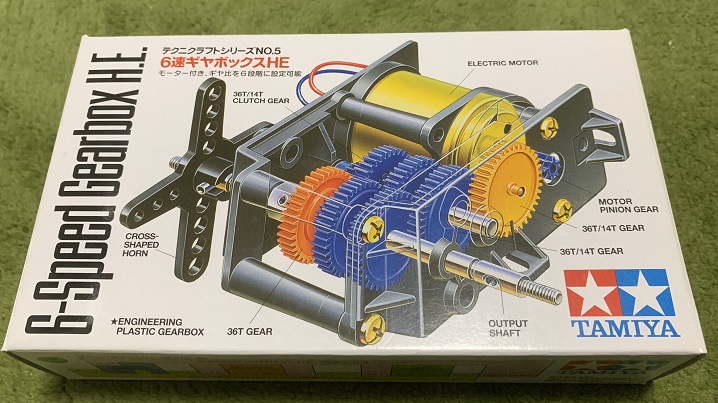
上下首振りにタミヤ 6速ギヤボックスHE使用
ヘルメットの内側に、タミヤのギヤボックスを使うと決めていましたが、ここではたと気づきます。
どれくらいのトルクが必要で、どれくらいのスピードで動かせるのか?と。
当然ですが、タミヤのギヤボックスを使ってロボットの頭部を動かす情報はありません。
もちろんパッケージにはギアを組み替えた表はあります。
| タイプ | ギヤ比 | 回転数 r/min | 回転トルク mN・m | 回転トルク gf・cm |
|---|---|---|---|---|
| A | 11.6:1 | 約870 | 約15.8 | 約161 |
| B | 29.8:1 | 約338 | 約40.7 | 約415 |
| C | 76.5:1 | 約132 | 約101.2 | 約1032 |
| D | 196.7:1 | 約51.3 | 約235.4 | 約2400 |
| E | 505.9:1 | 約19.9 | ★約226.1 | 約2304 |
| F | 1300.9:1 | 約7.8 | ★約226.1 | 約2304 |
| ●3V電源における260タイプモーター最高効率時の出力軸の実測トルクです。 | 単位換算サイトより算出 | |||
| ★印はクラッチ作動時の測定値です。 | ||||
自動車等なら前例もあるので目安になると思いますが、軸の長さや構造も違う条件でも同様と考えて良いのだろうか?
この時はyoutubeで参考となるモーター紹介動画を見つけたので、動かなければスピード落としてギア比変えるか、モーターをパワーアップをすることにしました。
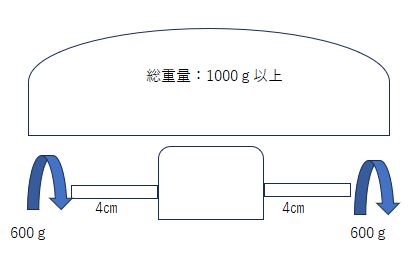
ヘルメットの重さが約600g+ラズパイが45g+それに目のパーツやら、今後フレームの追加、センサーの追加も含めると総重量は1000g以上を想定。
- 1cm先でのトルク
T = F x r = 2400g x 1cm = 2400g・cm - トルクは距離が変わっても一定なので、4cm先で必要な力は
F = T / r = 2400g・cm / 4cm
F = 600g
ギヤボックスの軸、左右両方を駆動させるので、600g x 2 = 1200g
しかしトルクはこれで良しとして、頭部がどれくらいのスピードで動かせるかは実際に動かすまでこの時点では不明です。
後に、この時のこともあって、ギア組み変えの比較イメージとなる動画を私自身も作成しています。
ところで、ギアボックス6速HEですが
軸の両側につけるジョイントですが一字型が2本。十字型が1本入ってます。
上記のように十字型をつかって軸両側をガッチリ固定したかったのですが
タミヤのホームページみてもオプションパーツとかカスタマイズとか見つからないので、
タミヤに直接電話したら、商品ラインナップとしては無いので店頭では手に入らないが、オプションとしてはあるので、メーカーホームページのカスタマーサービスで注文してくださいと言われ、カスタマーサービスにて代引きのリンクで注文しました。
両側に十字型を取り付けたい場合は、カスタマーで注文するか、もう一つ6速HEギアボックスを購入するしかありません。
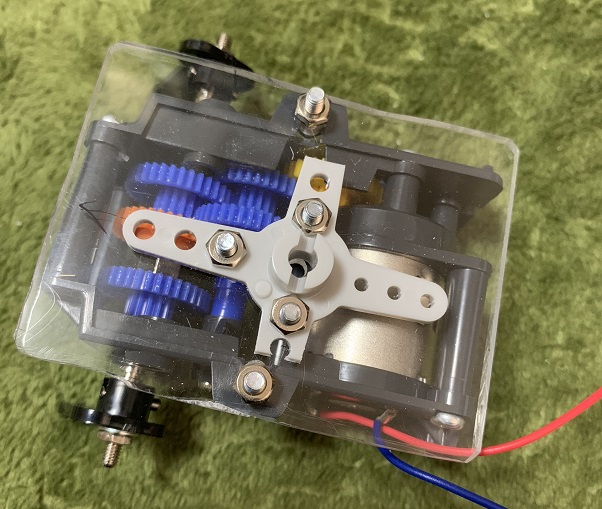
左右首振りに 遊星ギヤボックス使用
遊星ギヤボックスがトルクが高く本体自体が長いので、あえて機構をつくらなくとも首に合いそうと購入してみました。
遊星ギヤボックスはギアの連結の組み合わせで4:1、5:1、16:1、20:1、25:1、80:1、100:1、400:1と、
組み合わせが変えられるらしいのですが、買って箱開けてもそれしか書いてなくて、
6速HEの説明書のようなトルク、速度の記述はありませんが100:1でトルク580g・㎝ 回転数98rpmと書いてるサイトがあったので、この組み合わせで行うことにしました(トルクが不安だけど)。

4 自宅に設備が無くても、加工はホームセンターDIYスペース利用
ホームセンターにてDIYスペース利用
切断、曲げ加工、接着、穴あけなど、加工のしやすさにより、アクリルをギヤボックスの連結に利用することにしました。
強度は厚みを持たせれば期待できそうです。
2㎜厚、10cm四方を300円くらいで千石電商さんで見つけたので購入しましたが、もっと簡単に切れると思ってましたが意外と固く、大した工具を揃えていなかったのでDIY製作は自宅は簡単に行きません。
そこで前から目をつけていたホームセンターのDIYスペースを利用することにしました。
ただし、事前予約は必要です。
カインズの場合、カインズポイントカードに入ることが条件で、商品を現地で買えば利用は無料。
具材の持ち込みは1時間500円の利用料が発生します。
作業スペースとして、畳くらいの大きさの机が4つほど置いてあり、その中の一つは予約用として確保。
後の作業スペースは自由来店用とのこと。
電話予約は不可でインターネットからしか予約できません。
土日は直接来店者も多いらしいのですが、ボール盤など機材はは店舗で1セットしかなく、予約は机スペースの使用のみで、工具の空きは予約出来ないとのこと。
来店してもスペースしか使えなかったら・・・DIY工房は素晴らしい分、なかなか激戦のようです。

この時は土曜にもかかわらず、他に利用者もおらず、すぐ利用することが出来ました。
卓上ボール盤を利用して穴あけ
ホームセンターのDIY利用において、今回、一番必要としたのが金属への穴あけ。

タミヤギヤボックスとモーターとの接続にパイプ用のソケットを使うことを思いつきましたが、
金属で丸い為、頑丈な固定具とボール盤が必要でした。

ソケットはダイカスト製という材質でしたが、穴が開くときはスムーズでした。
ただ、あらかじめポンチ等で目印を打つのと、固定方法をもう少し考えておくべきでした。
穴が開き始めるまでドリル刃がすべり一本は折ってしまい、予備を使う事になりました。
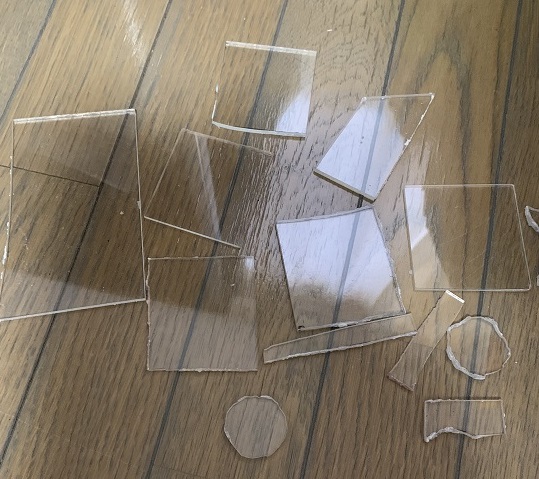
卓上糸ノコ盤を利用してアクリルカット
続いて持ち込んだ2㎜厚のアクリル板を卓上糸ノコ盤でカットに挑戦しましたが、振動で割れてしまいました。
その為、カインズで3㎜を買い直してカットしました。
アクリルのカットには注意が必要です。
工房内で販売している糸ノコ刃は木工用で、アクリルをカットするにはアクリル専用が必要とのことでした。
初めて知ったので準備なく自己責任で実施しましたが、2㎜厚は割れてしまい。3㎜はカット自体はスムーズに出来ましたが方向転換しようにも、カットしたところが摩擦熱でまた繋がってました。
なんとかカットは出来ましたが、方向転換が無理やりで形もいびつとなりバリも強く、結局カッターで削って形にしました。
DIYスペースの利用といっても事前の利用素材の下調べも必要であり、このように使いだしの慣れや想定外もあり、予定より実作業の時間が少なめとなりました。
利用される方は多めに予約時間を多くとっておいた方が良いかもしれません。
5 パーツ組み立て
前項までに基づき以下のように作成しました。

ソケットの穴あけにDIY工房のボール盤は助かりました。
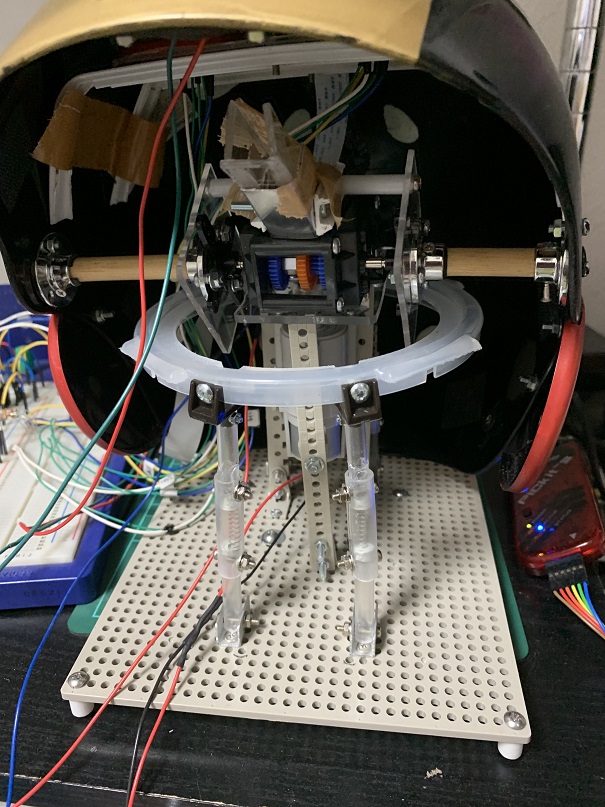
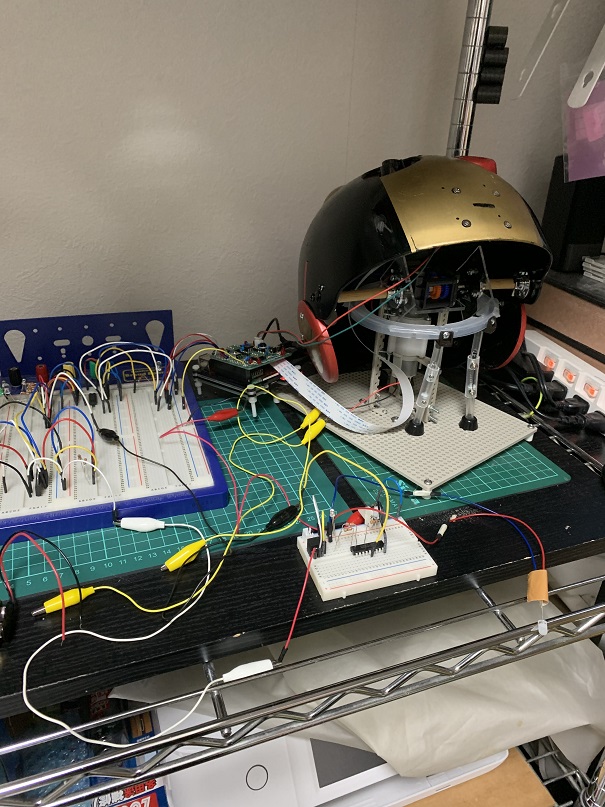
テスト用に遊星ギヤーボックスを仮組して
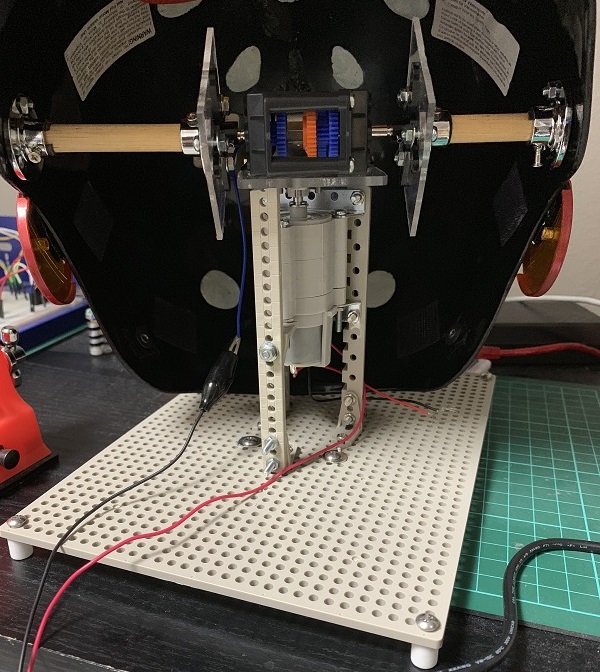
ヘルメット、タミヤ遊星ギヤボックス、6速HEギヤボックス、アクリル、シャフトなど全て組み合わせました。
左右の長さが違うのは、元々6速HEのシャフトが左右で長さが違う為、それにあわせてます。
さあ先程の課題であるトルクとスピード、ちゃんと動くでしょうか?動作テストします
仮組テストでは故障して大変な事になっていますが、思った以上にパワーには余裕があることを確認できました。
6 open jtalkを用いた音声出力テスト
トランジスタ技術 201803月号 AI電脳製作にてAIスピーカーによる音声出力がありますが、決まった音声しか出せず、A106らしい音声に変更出来ないかと調べているうちに、MMDagentとopen jtalkというのを見つけました。
(パラメータ -fm 7.0 -a 0.5 -jm 1.5 -jf 0.2 -r 0.8 -u 0.3)
AIスピーカーを利用する本製作とはマウント出来ず、単独で喋らせることしか出来ないのですが、これはこれで使い道がありそうなので一応試してみました。(初音ミクバージョンもあり試してみました。)
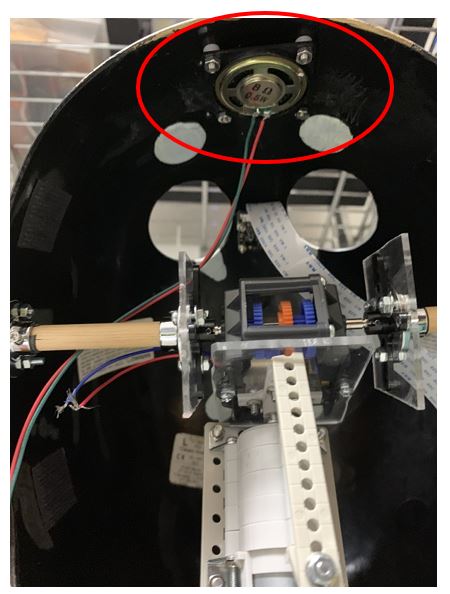
使用しているスピーカーはAIスピーカーキット付属のスピーカーでは無く、
同じくシリコンハウスさんで見つけた薄型スピーカーを利用しています。
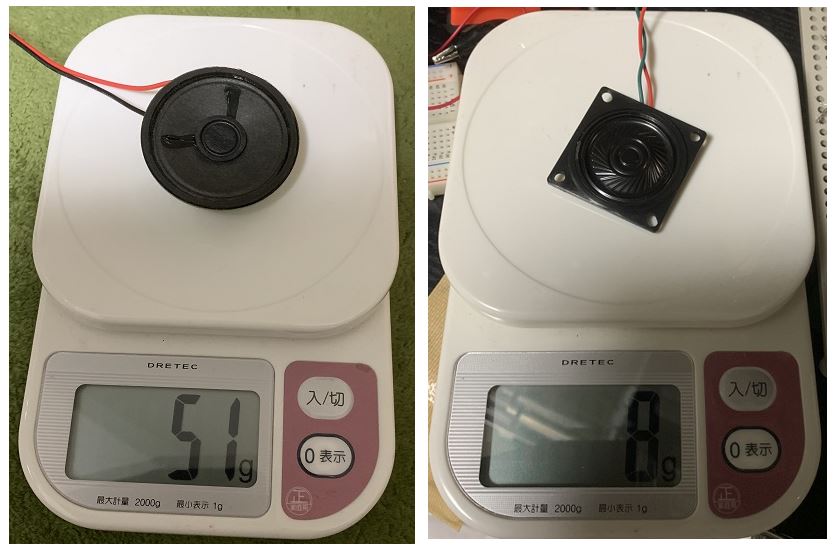
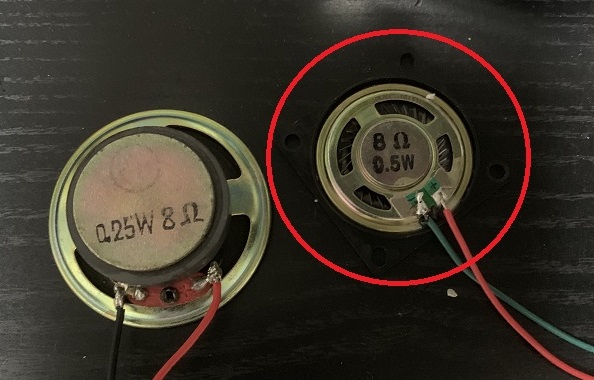
このスピーカー、薄型で軽く取り付け穴もある為、気に入りました。
7 mjpg-streamerを用いたカメラテスト
作り始めた時、目にカメラを内蔵と行きたかったところですが、シックス君の目はライトも兼ねてるようで・・・それ以前に目の色がクリアではないので目にカメラというのは無しにしました。
それに目に対してカメラを二つ仕込んで視差調整なんて出来ません。
(アニメを見て思いますが、ライトとカメラを併用とはどういう仕組みなんでしょう?)
しかし、やはり一つでもモニタリング用にカメラ付けたくなり、カメラを購入しました。
パッケージ
購入したのはRaspberry Pi Noir Camera V2という赤外線カメラモジュールです。
赤外線カメラで夜でもモニタ出来そうです。
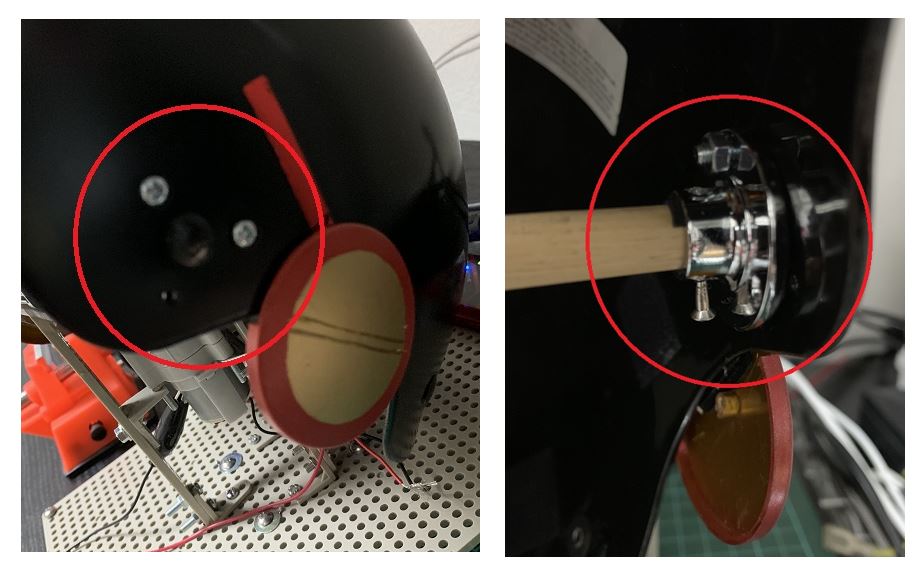
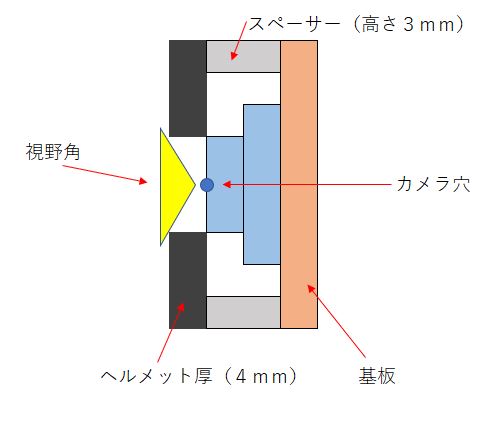
先に述べたように目に内蔵は不可能として目にはライトを埋め込むとし、カメラはモニタリングする際、
目の高さであり、かつカメラ穴が目立ちにくい、おでこにホール穴を検討すると自然と位置は決まりました。

ホール穴が結構大きめの穴になりましたが、どうも視野角度が狭いらしく、
紙に穴あけて確認したときは、中心の穴の大きさだけで充分撮影できましたが、
このA106に取付にあたっては、ヘルメットの厚みによってカメラ穴がどうしても奥にならざるを得ず、今の大きさまで穴を広げないとカメラ撮影した際に、角に影が出来る為、めだつギリギリまで広げました。
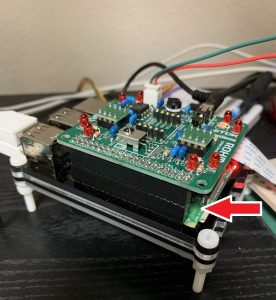
また、ラズパイ本体は後頭部に付ける為、付属のケーブルでは長さが全然足りない為、アマゾンで延長ケーブル買って付け替えています。

なお、AIキット利用でカメラケーブルを利用するとケーブルを挟み込んでしまう可能性がある為、
基板セットする高さを上げました。
モニタリングの機能追加にはトランジスタ技術201611月号「ロボット・ムービー製作」の記事からmjpg-streamerを利用してwebブラウザででストリーミング表示出来ました。
これで、リモート画面をみながら直接コマンドを打てば挨拶くらいは出来ます。
撮影条件によっては画質に赤みがかかっているのがなんだか気に入らないとこですが、赤外線カメラ利用ではやむなしでしょうか。

8 AI spekaerキット、テスト実施
ラズパイを購入したのはこのAIキットの為で、ラズパイ自体が初心者でした。
全くラズパイを触ったことのない自分には恐ろしく難しかったです(一か所でも手順書通りに進まなかったら間違いの箇所が分からなくなりました。)、3,4回はインストールし直したでしょう(笑)。
再度のやり直しは、サポートから完成イメージをダウンロードして途中からやり直してます。
手順書通りだと
リモートデスクトップでログインして、ターミナル起動。
envの仮想環境に入り(一行目)、ソフトウェア実行(二行目)で待機状態。
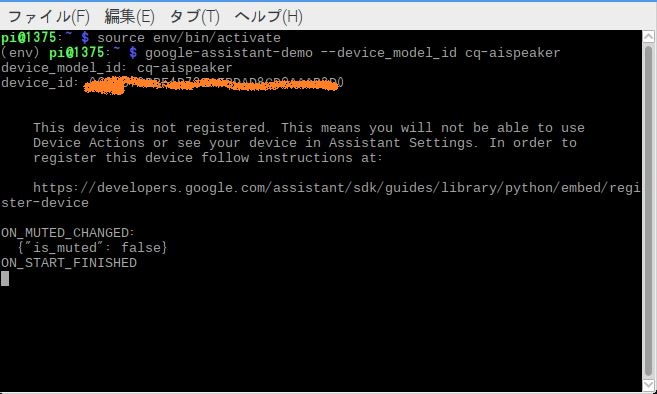
AIスピーカーキットはインストールにてgoogle assistantのお試し版の利用となります。
ok-googleで、英語で質問するのですが、私は英会話できませんのでテストは英会話アプリで試してみました(笑)。
この基板キットは音声入力にUSBマイクでは無く、MEMSマイクというのが基板に取付られていますので、非常にコンパクトに収まっています。
MEMSマイクというのは感度が高いらしいですが、調整がよくわからないのでiphoneを近づけないとちょっと弱いです。音声出力が低く何もないときはノイズが強いような気がしますが、一応きちんとヒアリングして回答してくれていました。
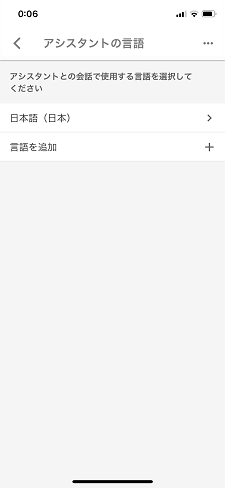
google assistantの日本語化ですが、このトランジスタ201803のサポート記事にあるイメージのバージョンは完成されていましたので、最終的にスマホ(iphone XS)にアプリgoogle assistantをインストールして、アシスタントの言語を日本語追加しただけで日本語化できました。
仮想環境をバージョンアップ等の調整は特に必要ありませんでした。
基板のボリュームも回して調整し、例のOKグーグルで天気を聞いてみました。
声が通常の女性の声で回答してくれています。
ターミナルの方も日本語を認識してくれています。
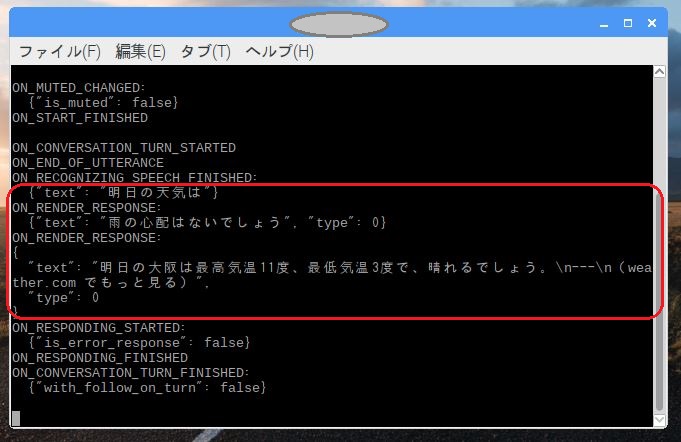
ウェイクワードと音声が変更出来れば夢のような機能実装となったでしょうが、
残念ながら女性の音声ではA106への利用としては使えませんので、メイン機能でありながらテストに留まっています。
その為、単純なセリフを入力して話すだけですがOpenjtalkを残して利用することになりました。
9 A106頭部とフレーム等、ディテール作成
首フレーム自作
頭部ですがテストの為、ギアボックスとギアボックスを嚙み合わせているだけの為、簡単に外れてしまいます。
その為、良し悪しはともかく、実際の工学ではこのような作成は存在しないでしょうが、首のフレームはアニメを参考にしながら自由に考えました。
この時は身近な物(100均)等も利用してイメージに合うものを加工しています。
目立って大きく見える箇所、実はこれ100均のお惣菜を入れる真空パックです。
大きさと硬さ、加工のしやすさでこれにしました。

自分でプラ筒を使ってサスペンションのようなものを作り、ダボをつけてジョイントしています。
(後に改良してアルミ筒に変更する予定でした)

円形のレールに沿って左右に移動、サスに沿って上下稼働として考えていましたが、やっぱり実際に作成するとハード面、ソフト面といろんな問題が浮上します。
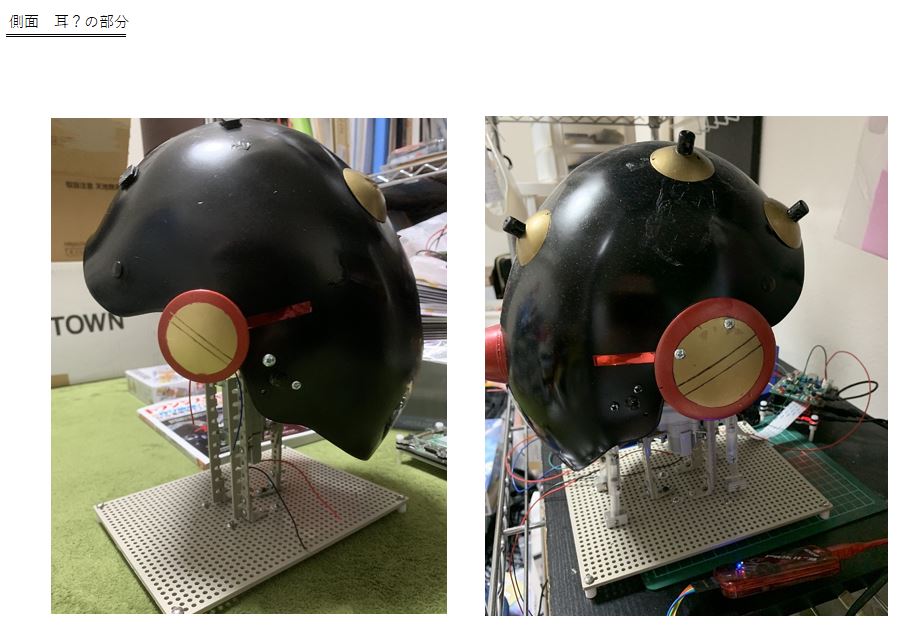
その他ディテール
頭部のアンテナは吸盤をパテ塗りして塗装です(もはや何でもアリ)。

頭部横の耳?にあたる箇所は、100均の朱肉のフタです。
目にLEDライトを組み込み
最初は目に色を塗ってプラバンを貼ってましたが、ライトにしました。
(ラズパイだけでは足りない為、74HC595も利用しています。)
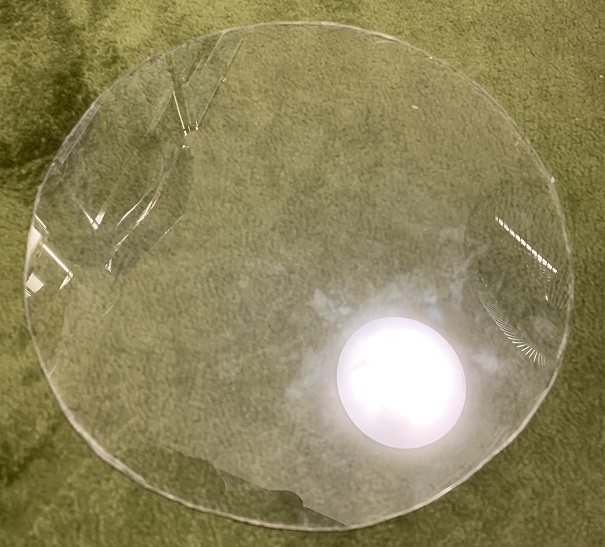
ライトにするにあたりアクリルを使用予定でしたが、アクリルに関して調べているうちに
集光アクリルというのを知って惚れ込んでしまい。
アクリ屋ドットコムさんというところに集光アクリルを注文しました。
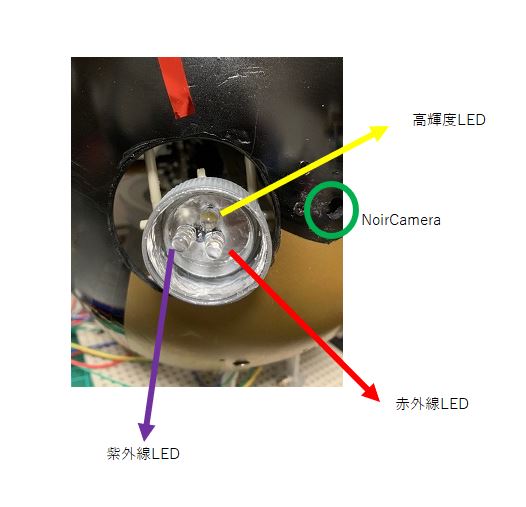
面白いと思って目の部位には三つのLEDを組み込んでみました。
- 通常の高輝度LED
日亜化学5Φ白色LED NSPW500DS 3.2V 20mA 27000mcd - 夜間監視用に赤外線LED
Optosupply 5Φ赤外線LED OSI5LA5111A 1.6V 100mA 940nm 15° 60mW/Sr - 集光アクリルと組み合わせて、夜間で雰囲気用に紫外線LED
OSV1YL5111A 5Φ 紫外線 360~370nm
以上のLEDは大阪のシリコンハウスさんで買いました。
回路は「eagle回路図をタッチペン(サーフェスプロ)での作成と使用感」にあります。
LEDをライトにですが、高輝度といっても、一つではカメラで見る為の光量が足らず弱さを感じます。
また、期待した集光アクリルも一番映えるのは端であり、真ん中を照らしても通常のアクリルとあまり変わらないのが残念でした。(端は目に固定する箇所の為、見えません)
(集光アクリルは表面を削って絵や文字を描いたり、形状自体を際立たせることが良い使い道ですね)
同じ作るにしても現在ならCADも3Dプリンタも所有しているので、もう少しきちんとつくれます。
我ながらこんな部品で良く作ったなという気もします。
ボディ作成と駆動部作成
ボディ外形
ボディは、またもや市販の商品を流用です。
コーナンで漬物樽に目をつけて、真剣にどのタイプの漬物樽が良いか選択してました(笑)。

20ℓ用を購入し、くり抜いて塗装ですが、材質のポリプロピレンは塗装するとすぐ爪で剥がれてしまいました。
ミッチャクロンを使ってみたらポリプロピレンでも吸着して塗装できました。
ミッチャクロンはこの製作で硬質ゴムでもポリプロピレンでも役に立ってくれ本当に万能です。
(参考)amazon ミッチャクロン

タミヤのTS-38ガンメタルで塗装しています。

据え付け位置も考えないといけないので組み合わせてみました。

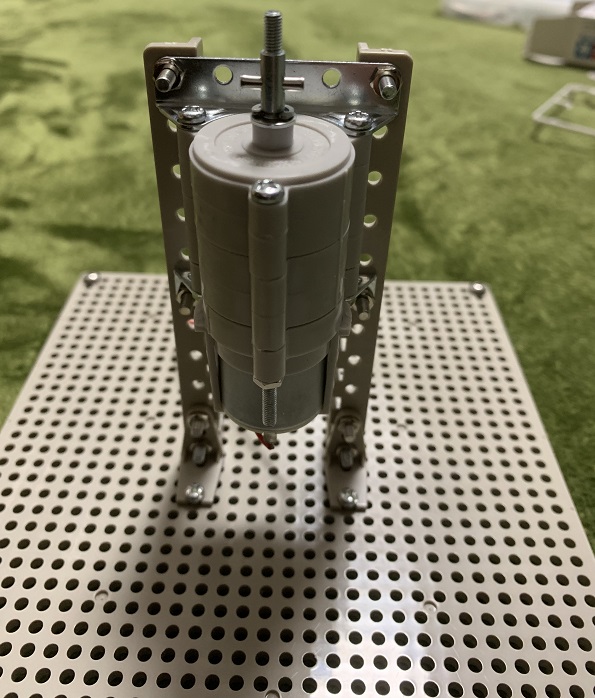
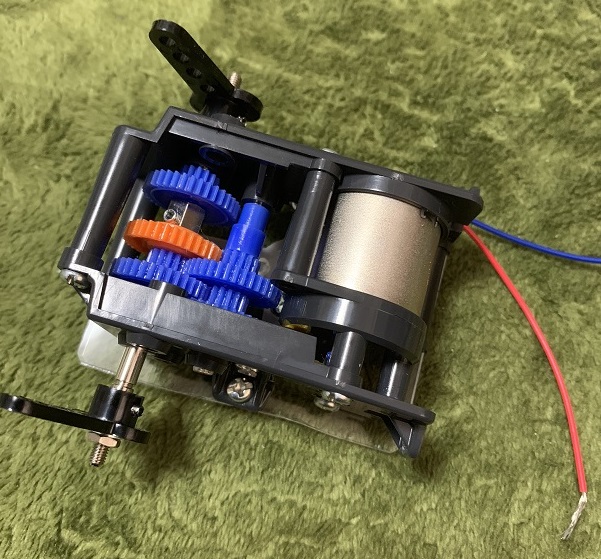
駆動部(移動用)部品
駆動部は書籍PICと楽しむRaspberry Pi活用ガイドブックにおけるリモコンカーの製作を参照しています。
(参考)amazon PICと楽しむRaspberry Pi活用ガイドブック
本の中身をそのまま書くことは出来ないので、以下は使用した部品等となります。
興味のある人は書店で手に取って見てください。
部品表に基づき、前進・後退・転回用のタミヤダブルキヤボックスと、小型ながらパワーのあるトルクチューンドモーター、等を集めました。

| ギア比 | 回転数 | 回転トルク |
|---|---|---|
| 12.7:1 | 1039rpm | 94gf.cm |
| 38.2:1 | 345rpm | 278gf.cm |
| 114.7:1 | 115rpm | 809gf.cm |
| 344.2:1 | 38rpm | 2276gf.cm |

冊子の中の製作では、補助輪としてタミヤ ボールキャスターの使用があるのですが、A106は大きさも重さも違うので、補助輪に関しても100均にて植木鉢用のキャスターを利用してみました。

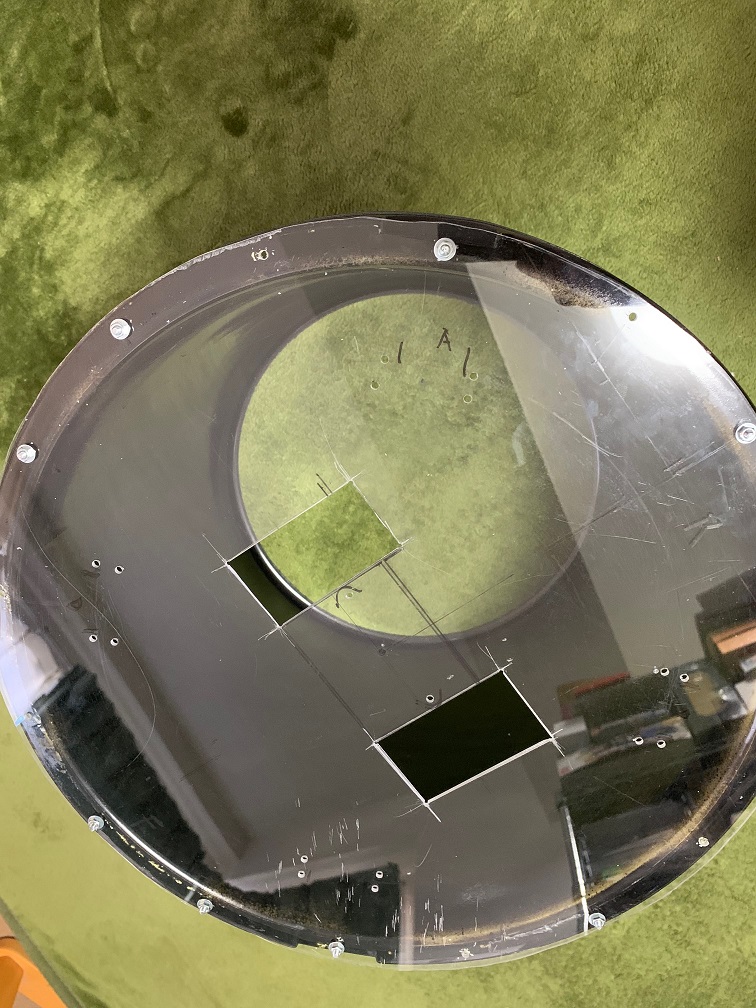
土台としてまたも、アクリルを使用しました。
出来てから木材にした方が安定したかもと思いましたが、この時は透明なアクリルを利用する方が、表・裏どちらからも部品の取り付け位置や加工位置が確認しやすいと思った為。

アクリルは漬物樽を裏返して外周と内周にそって下書き。それをアクリルカッターで何度も切り込みを入れました。
円を切るのは大変難しいんじゃないか?と思いましたが、直径40cmくらいの大きさともなるとカーブの切り込みは思ったよりスムーズで飛び出すことも無く、直線的な感じで自然に切り込みは引けます。
(気が遠くなる程、繰り返しの切り込み回数となりましたが)
片面でギリギリまで切り込みを入れた後、慎重に回りを折っていくような感じでパキッと切り出しました。
頭部用の固定台は円が小さくカーブがキツイのでプラバンカッターでは無理がありました。思い切ってヒートカッターを使ってみました。
ややいびつになっていますが、大円をプラバンカッターで切るよりかなり時間短縮で出来ました。
線を外さないように表面と裏面から筋を入れ最後はやはりパキッと切り出してます。
完成と反省点
上記までの利用により、冒頭動画のA106は完成しました。
もちろんマンガのA106には程遠いですが、初めてカタチとなる作成にチャレンジしました。
頭部も動かせるし、喋らすことも、移動してリモート撮影することも出来ます。
しかし以下の問題はありました。
- パワー不足
総重量は2.7k、タミヤダブルギヤボックスの最大トルクの344.2:1にして、モーターはトルクチューンPROというモーターにパワーアップしていますが、やはり回転トルクをオーバーしています。
摩擦負荷トルク=摩擦係数 X (総重量 / 2) X (動輪の直径cm / 2)
屋内動画ではスムーズに移動していますが、外では軽快な移動は出来ませんでした。 - 強度の問題
もともときちんと設計して作成したものでは無い為、
外で動かすと、破損して故障が多く部品や構造そのものの改善が必要でした。 - 昨日の統一
一通りの機能は備えていますが、プログラムの知識が乏しい為、それぞれの機能はほぼ単独です。
これではラジコンでロボットというには理想と離れています。
上記の問題点は技術の習熟が必要であり、一日二日で解決できる問題では無い為、行き詰りもあって、
今回の制作は、一旦ここで区切りとなりましたが、この経験を通じて得られた技術や知識、そして挑戦する楽しさは、何よりの収穫でした。有り合わせのパーツと限られた道具でも、やればここまで形にできるという自信がつきました。
また、プロフェッショナルが多いSNSでの公開に不安もありましたが、多くの方が親切に教えてくださり、交流を通じて新しい学びや視点を得ることができました。こうしたつながりは制作活動を続ける大きな励みになっています。
今後は3Dプリンタを活用し、さらに高度な制作に挑戦する予定です。加えて、ロボット制作用のフレームワークであるROS2を学びながら、次なるプロジェクトに取り組んでいきたいと思います。ものづくりは終わりのない旅ですが、その一歩一歩を楽しみながら進んでいきます。

