[swell_tos]
カタパルト作成編

ガンダムビルドファイターズ、大好きなアニメなんですが
中でもケンプファーアメイジング、超超好きです。
主人公のライバル三代目名人カワグチの機体ですが、ぶっちゃけ最初の頃はなんか地味なモビルスーツだなと、たいした興味はありませんでした。
ですが第18話ブラッドハウンドで、カワグチを妬み引きずりおろそうとする敵がいて、あらゆる卑怯な策を講じる敵にあと一歩のところまで追い詰められますが、
絶体絶命的な状況において、駆け引きだったのか、計算していたのか天才的な逆転勝利を収めたカワグチとケンプファーアメイジングに私はすっかり惚れ込んでしまい、めちゃくちゃ好きになってしまいました。はい(笑)。
なのでこのプラモ前から所有していましたが、今回は出撃シーンを作っちゃいたいとおもいました。
※以下作成記です。毎度の事ですが、作りこみの甘さ、製作の都合上実際と違う点があるのはご容赦ください。
※この作成(2021)は当時ラズパイゼロで作成し製作未完となっていますが、その後ラズパイピコを使う事を覚えたのでラズパイピコで作り直す予定です。
リフトベース作成
まずはリフトの作成から。
プラモが1/144なので、それに合わせて土台は3Dプリンタでそれっぽいものを作成。
デッキはフラットが望ましいしデカくなる。これを3Dプリンタで作るのはさすがにちょっとアレなので、工作を回った際に見つけたスチレンボードというのを使用することにしました。
5㎜厚ならそれなりに頑丈さも見込めそうだし、スチロールなので加工も楽だろうと。

でもこれ、よく考えたらスチロールってラッカー系使えないので、土台はタミヤ優先で色塗っちゃって、水性で探しても合う色無いんですよね。ガンメタで統一しようと思ったのに・・最終的には土台だけ浮いた色になってしまった・・・(汗)
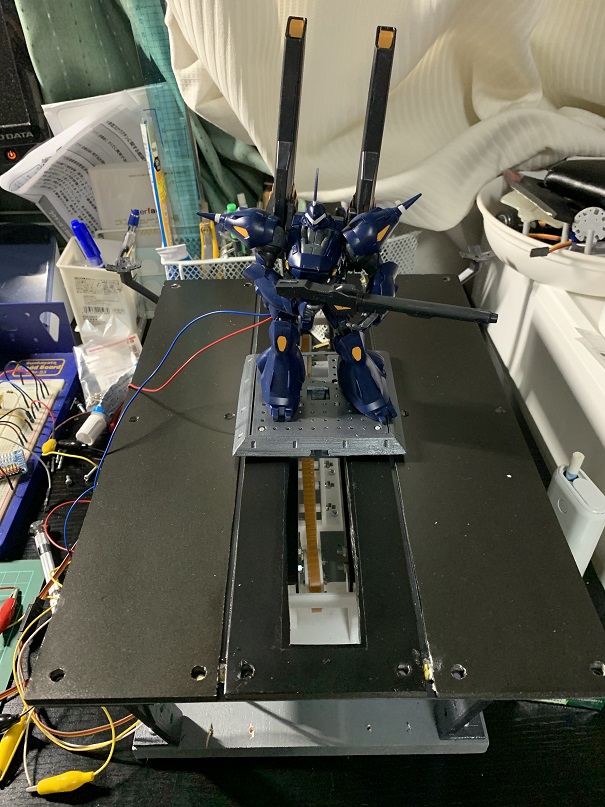
ケンプファーアメイジングが載っている土台(PLA)はタミヤTS-100 ブライトガンメタル(セミグロス)で塗装しています。
ベースのスチレンボードにはミスターホビー(色忘れた・・)を使用しています。
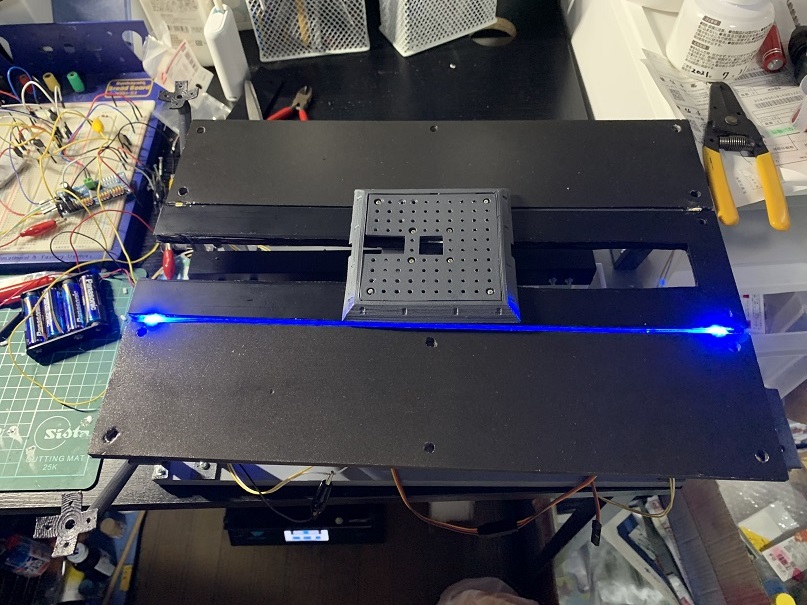
ベースの真ん中が少し違う感じですが、これはスチレンを削ってしまい修正に困りまして、同じくタミヤ製品で極薄プラ板なるものを発見したので貼り付けてます。スチレンと似たような色を探してタミヤTS-06マットブラックを使用。
一番下の土台(木材)は塗り面積が広すぎるのでコストダウンとしてアサヒペンの大容量スプレーを使用しています。
(参考)
タミヤ 楽しい工作シリーズ No.139 スチレンボード5mm厚 2枚入
タミヤ タミヤスプレー TS-100 ブライトガンメタル
タミヤ(TAMIYA) スプレー TS-6 マットブラック
アサヒペン 塗料 ペンキ 水性多用途スプレー 420ml グレー
また、真ん中の両サイドには透明プラ棒を埋め込み、前後から光らせて(光ファイバーの要領)にて
雰囲気が出るようにしています。
(参考)タミヤ 楽しい工作シリーズ クラフト No.207 透明プラ材3mmコの字形棒
リフト駆動部作成
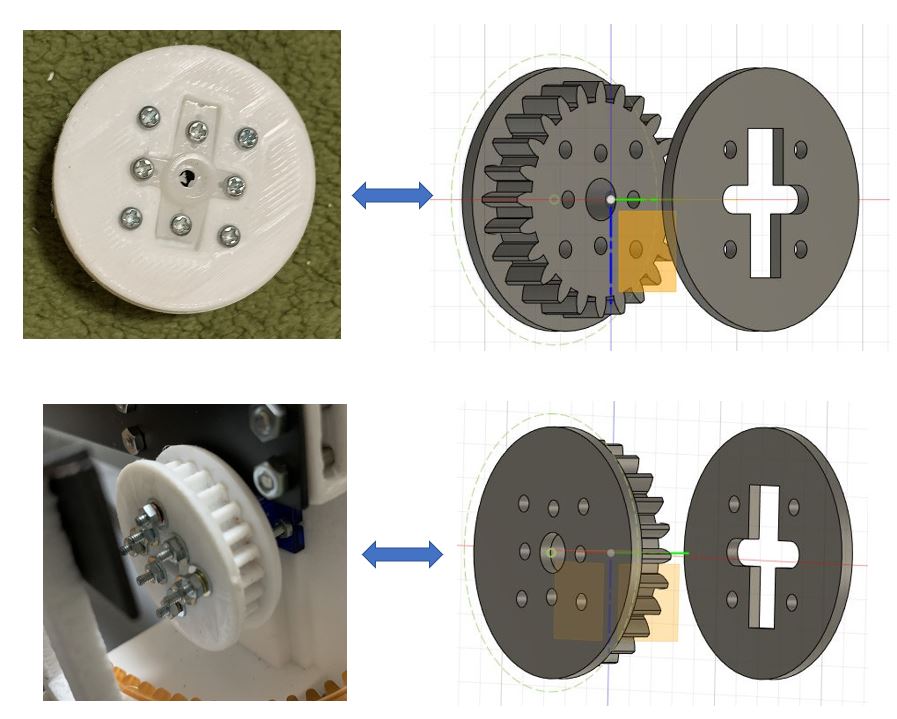
リフトの駆動は電子工作店でみかけるレインボープロダクツのプーリーベルト(6mm X 600mm)を使用です。本来は専用アルミプーリーと合わせて使うんでしょうが、 手持ちの回転サーボと組み合わせて使いたかったので、ゴムベルトを伸ばした状態でおおよそのピッチ計って、fusion360のモジュールを利用してサンプルを作り、ベルトと噛み合う大きさまで縮小を繰り替えして作りました。
参考サイト メーカーズラブ 【歯車マスターへの道】超入門編・Fusion360での歯車の作り方
参考 fuison設定値
一般
パーツ番号 Spur Gear (24 teeth)
パーツ名 Spur Gear (24 teeth)
説明 Spur Gear; Module: 1.7; Num Teeth: 24; Pressure Angle: 20,0; Backlash: 0.50 mm
最初、ギアは3Dプリンタでサーボ直結で作ってみましたが精度が低く、すぐ外れてしまうので、結局元のサーボホーンと組み合わせて作りました。サーボホーンカットしギアとサンドイッチする形で作ってます。
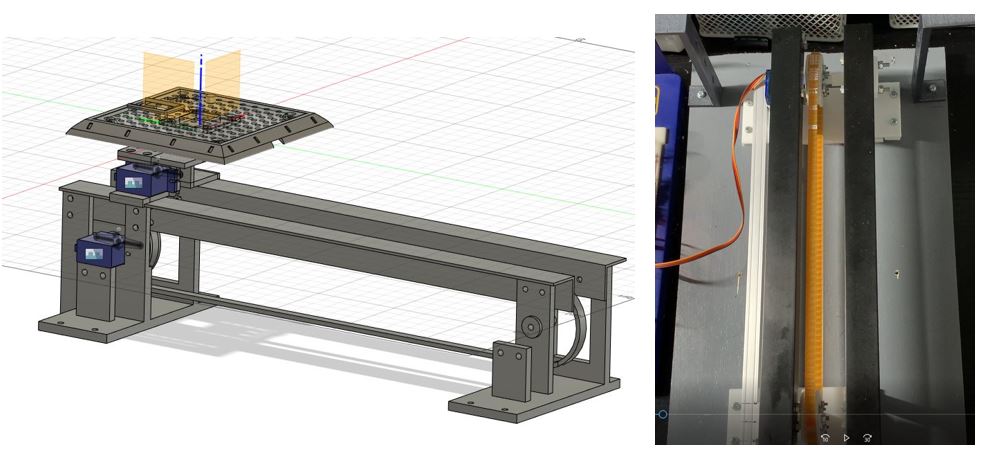
後はベルトの最大長に合わせて位置調整をしたコンベアを作成。
今までの反省点として、3Dプリンタを手に入れてから何でもかんでも3Dプリンタで作りたくなってしまうところですが、それだと却ってうまくいかないことが多いです。
〇リフトのレールは滑りやすい材質でホームセンターのL字プラスチックを利用。
〇滑車と滑車の間は歪まないようにアルミのコ型アングルを使用。
上記2点も3Dキャドでパーツを作成し配置と位置調整を行いました。
3Dキャドって3Dプリンタ用のパーツを作るだけでなくて、配置や位置調整にも使えることは便利だなぁということを今回実感しました。
リフト駆動にFS90Rサーボの使用
コントローラはラズパイゼロを
リフトの駆動にはサーボFS90Rを使用することにしました。
タミヤギヤボックスも考えましたが
●FS90R 130RPM 1.5k/cm
●タミヤ ミニモータギヤボックス ギヤ比41.8の組み合わせで 150RPM 0.202k/cm
そんなに変わんないから手持ちのPCA9685使った方が簡単そうだったので。
SG92R利用も考えているので、サーボとDCモーター二種類使うと複雑になる、ここはシンプルに行きたかったので。PCA9685で統一出来るならその方がいい。
PCA9685とSG90等の角度制御の情報はたくさんあるのに回転制御の情報はあんまり見つからないので、もしかして使えないのかな?とも思いましたが、単純にパルス送ってるだけだろうし、適合するパルスを送ればそんなことはないはずだと取り合えずやってみました。
回路図
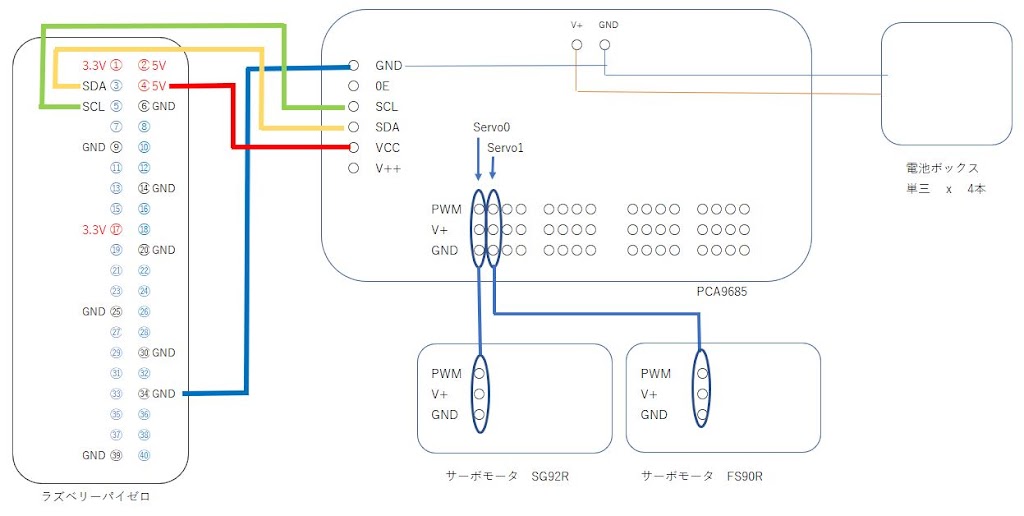
コンベアテストとして使っているのは図(右)FS90Rです。
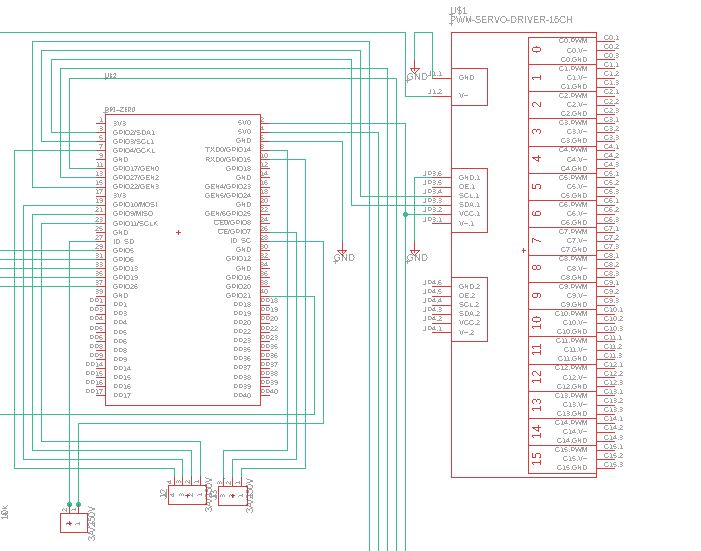
Eagle(ラズパイとPCA9685の部分だけ)
プログラム
プログラムはこちらのサイトを利用と参考にさせて頂きました。
ラズベリーパイとPCA9685で複数のサーボモータを動かす
こちら他の方のリンクも含めてPCA9685利用のインストールから含めて分かりやすく勉強になります。
SG90等角度サーボ使うだけならこのまま利用させてもらえばいいんですけど、回転サーボを使うにあたり、このまま使えるものなのか真剣に考えました。
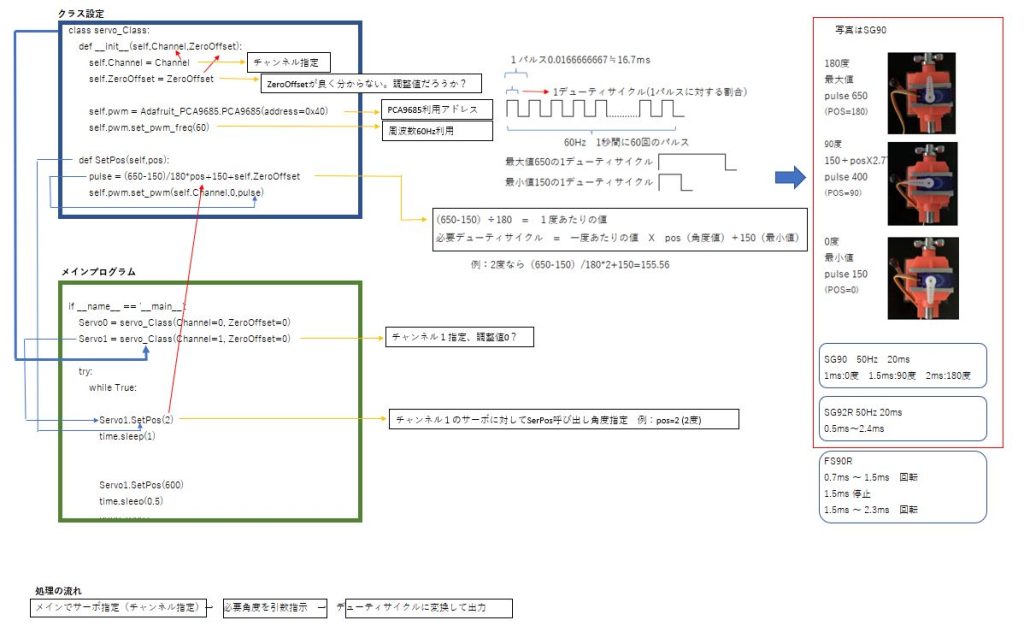
覚えたてのpython書籍で勉強した内容をフル活動させてまとめてみました。
考え方に間違いがありましたらご指摘頂ければ幸いです。
こちらの方の使ってるサーボは自分の持ってないサーボですが、
手持ちのSG90 SG92Rを使ってテストしてみましたがほぼ同様に角度制御は動きました。
ちょっとZeroOffsetで基準位置調整というところが、PCA9685のデータシートを読んでもピンと来ないのですが、単純にPWMのデューティサイクルを送ってるように思うので、
回転サーボFS90Rでもパルスを引数に与えてみましたが思うように動きませんでした。
仕方ないので直接0~3000くらいまで直接、値を与えて入力してみました。
やり方は良くないと思いますが、一応PCA9685でも回転サーボは動くことは確認できました。(計算の仕方が間違っていたのかも・・・)
コンベアに対して、リンクのプログラムに対してSetPos(2000)で停止。SetPos(600)で正回転。SetPos(2)で逆回転しています。
カタパルト作成までは完成しましたが、ケンプファーとの連携動作で思うところがあって結局製作は保留となっています。
先頭に記述したようにラズパイピコを利用した方がもっとシンプルに作成出来そうなので又あらためて再開を検討しています。