
購入から数回使用したハンドジェスチャーラジコンですが、メカナムやジェスチャー操作の仕組みを知りたくなったので早くも分解してしまいました。
これホントいいおもちゃで勿体無かったんですけどね・・。
もう一つプレゼント用に買ったから許して・・人(_ _*)
おもちゃといっても侮れないすごく良く出来た仕組みでした!メカナム走行に興味ある人は参考になると思います。
ハンドジェスチャーラジコン分解
早速分解して行きますが、付属の電池カバー用のドライバーで本体カバーもネジを回せました。
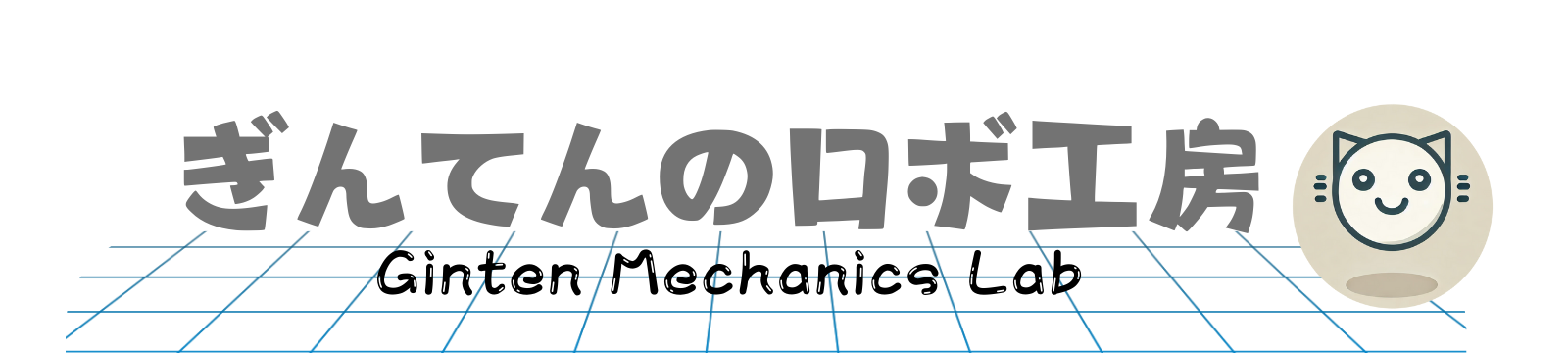
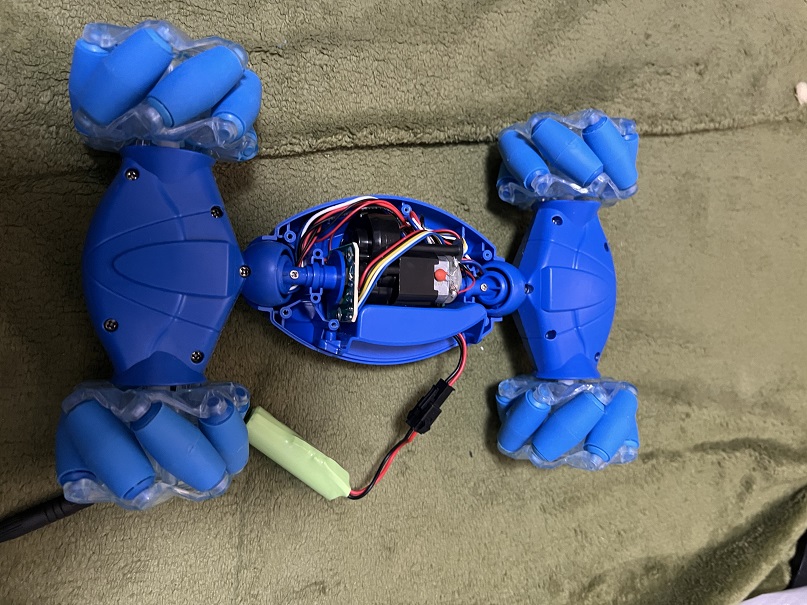
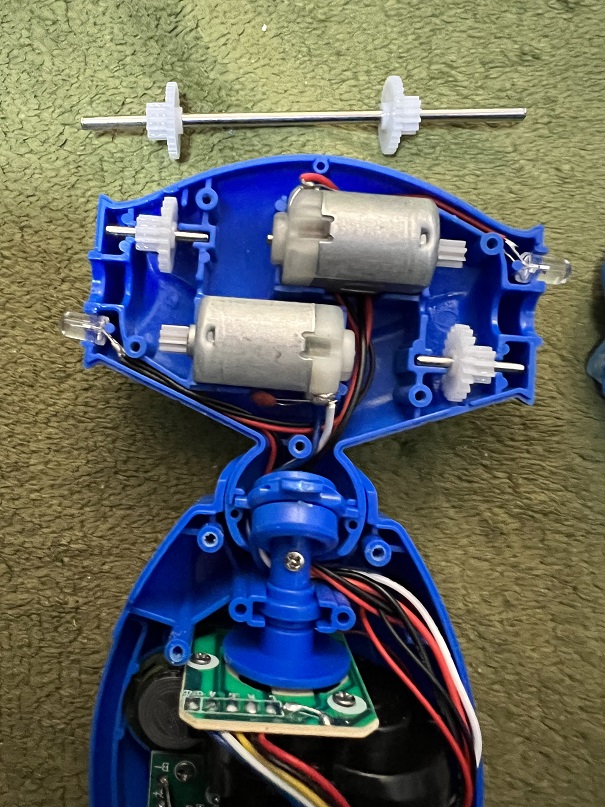
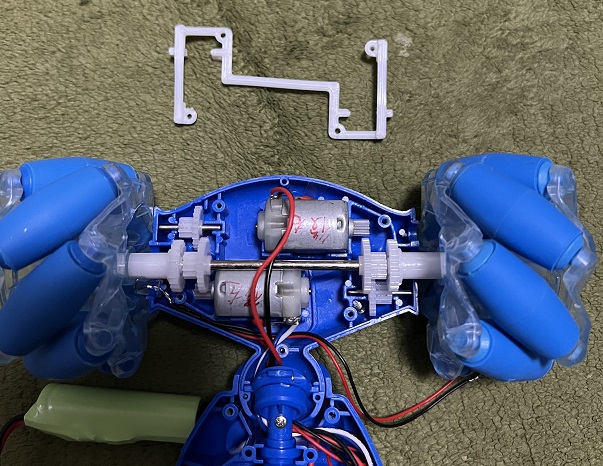
ひっくり返して、本体部の裏蓋をあけると変形用のモータ、それからフロントとリアの接続するシャフトが見えます。
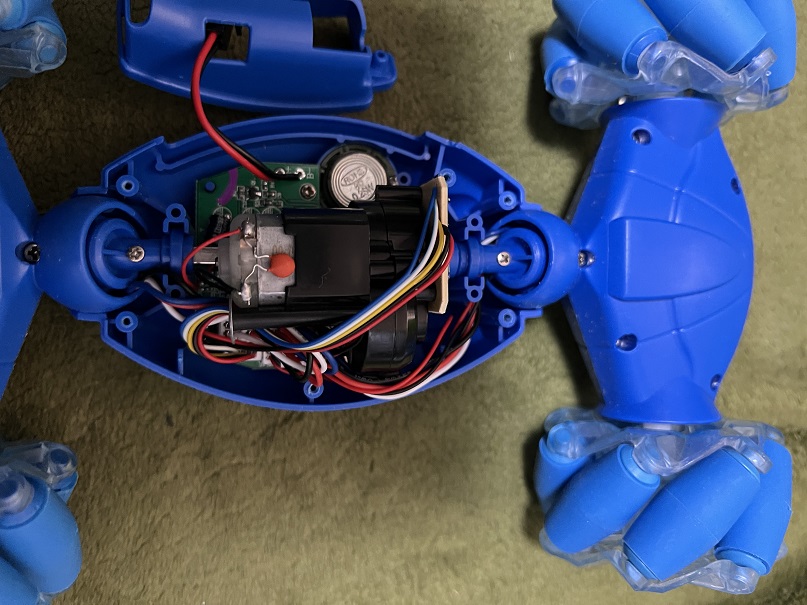
分かりにくいので縦写真
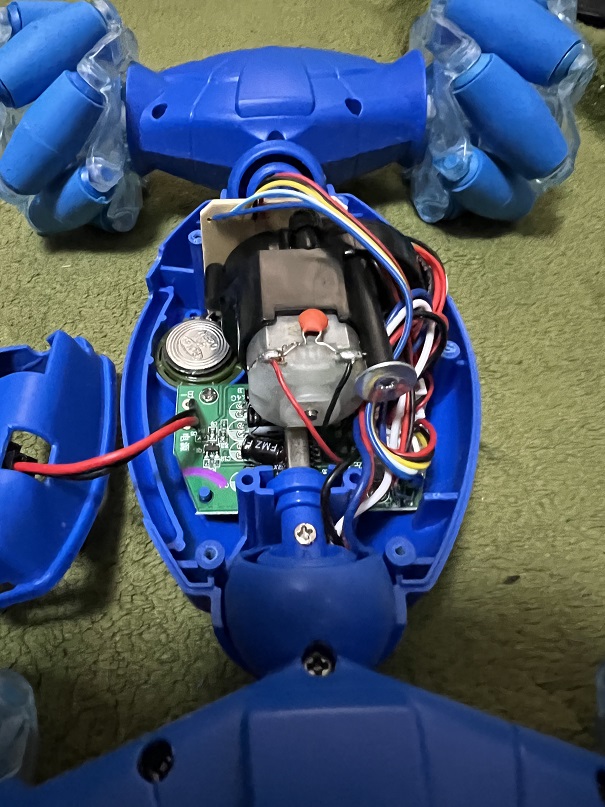
左側に見える銀色の丸いのはスピーカーです。
デモンストレーションのダンス動作の際、こんな小さなスピーカーでも音質はともかく、結構な音量で楽しませてくれます。
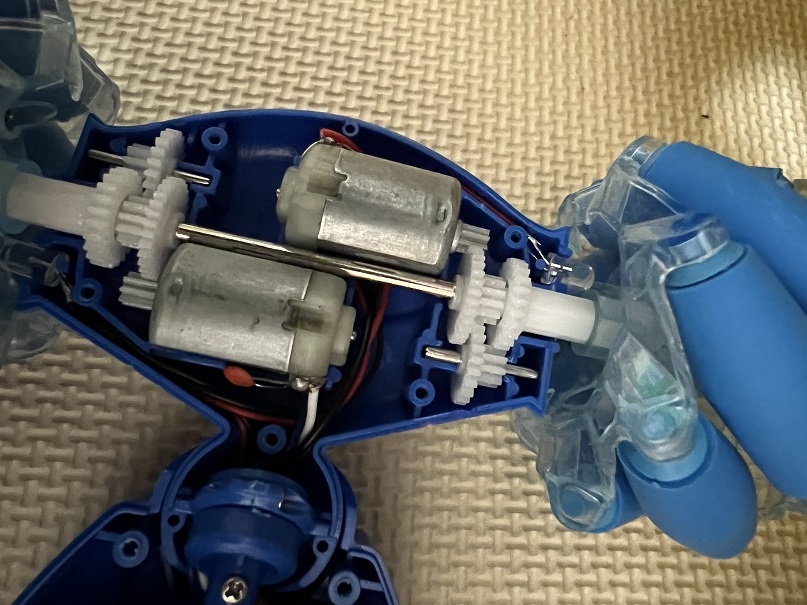
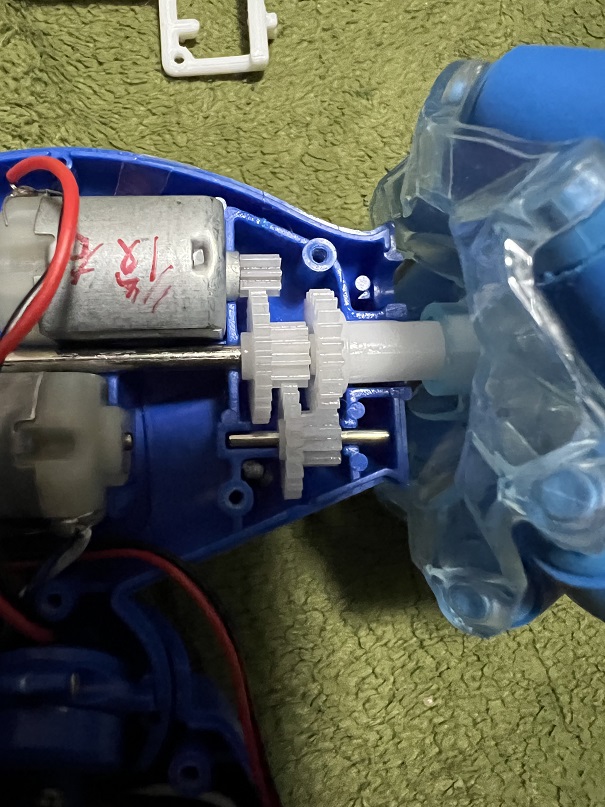
メカナムを用いた四輪駆動ですが、中心のシャフトの前後の先端にギアがあって本体をひねります。
フロント部とリア部のカバーも開きます。
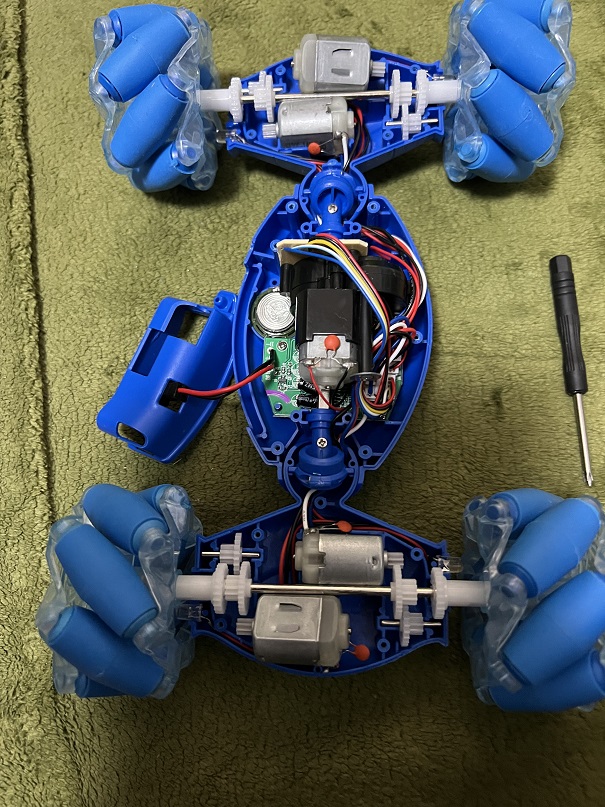
まさにメカナム、4輪駆動と肩書はあったけどタイヤ一つに対してモーター一つづつ。
左右のみ独立して回転できます。
それぞれの4輪、同じギア比でトルク作ってるんですね。
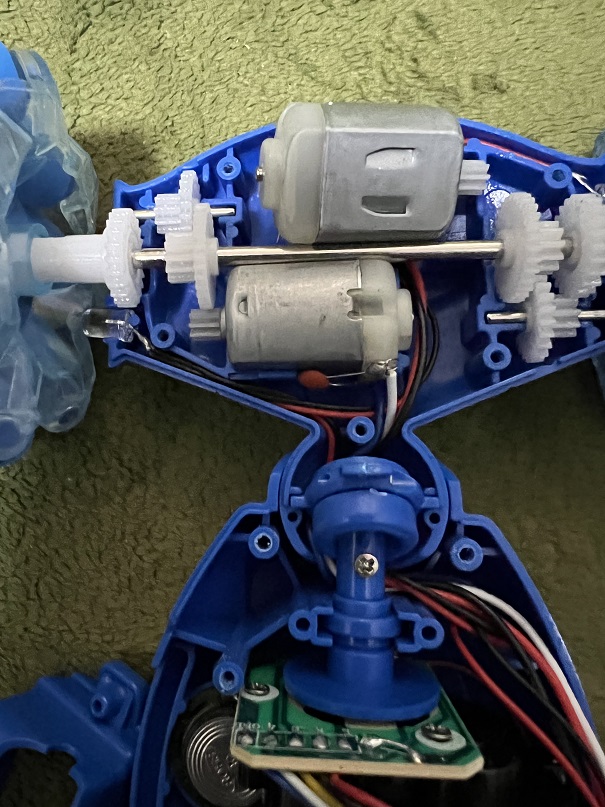
ホイール近くのギア部を良く見るとLEDも見えます。
走行時すごく派手にピカピカ光ってましたけど、意外とシンプル。
透明だけどギザギザなホイールを照らしてあそこまでの演出効果が出来ているんですね。

ホイールのみ取り外します。

又、タイヤもギアとセットで組み立てられてるから本体にはめたときはギアが本体に対して引っ掛けてストッパーになってるから、タイヤだけ外れて転がっていく・・なんてことの無いようになってるんですね。
いやぁ良くできてるなぁ。
タイヤを全て外してみた状態です。
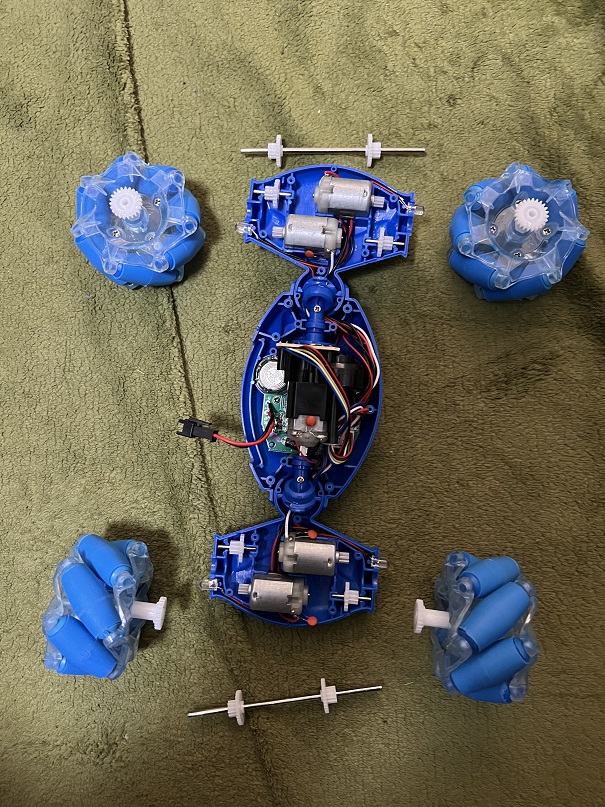
モーターの位置は互い違いだけど重心が取れているのか。
さらにモーターまで外した状態
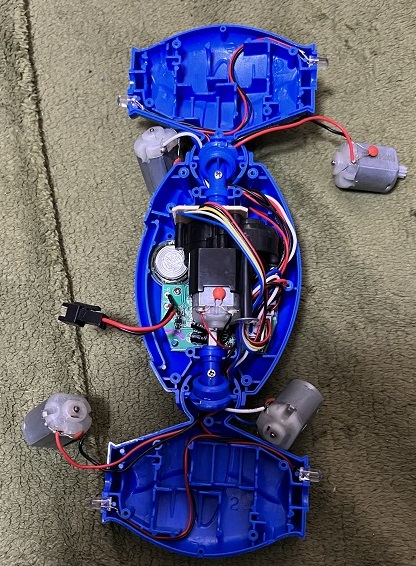
ここまでくるとすっげーシンプル。
真ん中の黒い部分は変形用モーターです(本体リフトアップダウン)。
残った部分としては単純に中央のコントロールで各モーターの回転方向と回転スピードを制御してるだけなのか・・これであんなに楽しく出来るのか、すごいなぁ。
モーターは無記名だけど、大きさからいって日本でいえばマブチモーターの130といったところでしょうか?
一つのモーターと一対で一つのホイールを動かしてます。
3段変速でしょうか。
一応、歯数も計って見ました
数値がギアの歯数で、()の中は最大直径と最小直径です。
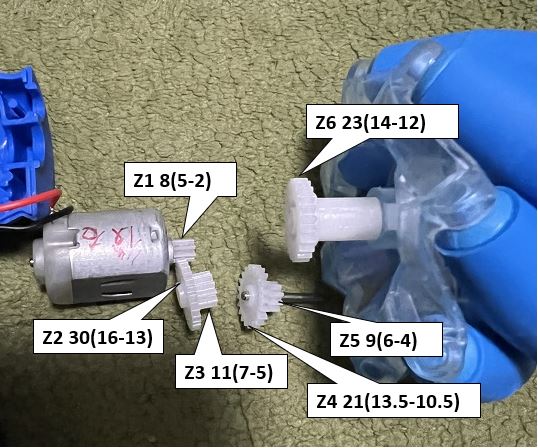
独学なので間違ってたらご指摘下さい(汗
ピッチ無視ですが
速度伝達比=Z2/Z1xZ4/Z3xZ6/Z5=約18
マブチFA-130 無負荷8600/18=480rpm…でいいのかな??
分解した状態での動作を確認したいので、動かしてもギアが外れないように、3Dプリンタで治具を作ってみました。
さて、ここでメカナム駆動が理屈は分かっていますが、どういう動きなのか気になります。
本体に取り付けたままだと、回転が早すぎて駆動のイメージが分かりにくいので、
車輪を本体から取り外し、メカナムホイールだけでシンプルに構成し,動きを確認してみました。
動画を見て頂くと、確かに実際に駆動力を与えているのは車輪で、個々のメカナムホイールは方向を与えているだけというのがよく分りました。
なんだかドローンの方向制御にも似ていると感じるのは自分だけでしょうか?
確かにメカナムを用いた駆動は便利です。ロボコンでよく利用されているのも納得です。