2020年7月– date –
-

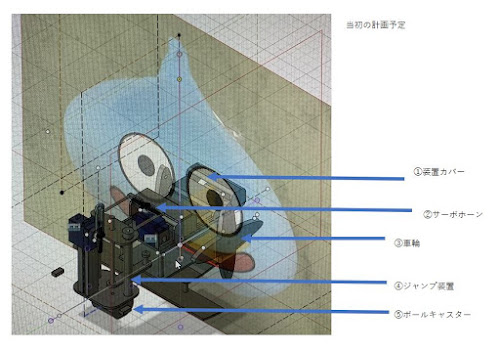
爆走!スライムラジコン製作記3(自作ラジコン) 製作編
爆走!スライムラジコン製作記3 製作編 ラジコンを動作させる部品と3Dプリンタを基にパーツを準備し、実製作に入って行きましたが、理論と実践はちがうもの(技術不足なだけだろうけど)当初の製作予定からは大きく変更を余儀なくされました。ここは分か... -
爆走!スライムラジコン製作記2(自作ラジコン) 3Dプリント編
爆走!スライムラジコン製作記2 3Dプリント編 印刷 この記事は2020/7執筆です。前回執筆の3Dプリンタ設定→サンプル印刷後、今回はオリジナル印刷となります。印刷データとしてSDカードに最初から入っているフクロウデータと違い。FUSION360のCADデータ... -
爆走!スライムラジコン製作1(自作ラジコン) アイデア編
爆走!スライムラジコン製作記1 アイデア編 3Dプリンタで単純な印刷ではなく、何か製作したいと思いました。ラズパイ等を利用して4足歩行等に挑戦し、プログラミングと設計出来るようになりたいところですが、まだその段階には至ってません。丁度ドラク...


1